
COURSEWORK
Pushpa's EV-RE-001 course work. Lv 3
| Pushpa R | AUTHOR | ACTIVE |
27 / 10 / 2024
Task-1: Tinkercad
Created a tinkercad account and familiarised myself with simulation, editing and wiring components by the help of tutorials. Later on started to design a radar system using ultrasonic sensor and servo motor listed under projects. It was the first task i did and it was really a great time learning and exploring tinkercad, the site is very useful and has made learning easier for beginners. (https://www.tumblr.com/pushhpa/765474931446300672?source=share)
Working:
- The ultrasonic sensor uses sound waves to measure the time taken for the object to bounce back and the servo motor helps in rotating the sensor to cover a large range.
- We know that, Distance = (speed/time)/2 [2 because it is the total distance from the sensor to the object and back to the sensor]
- The distance is calculated by sending a trigger pulse from the sensor , and measuring the time taken for the echo to be received .
Task-2: Get familiar with the command line on ubuntu
This task required us to get familiar with the command line in ubuntu and we had to execute various tasks. (https://www.tumblr.com/pushhpa/765475183887777792?source=share)
Task Instructions:
- To create a folder named test: mkdir test (mkdir = make directory)
- To change the directory: cd test (test = folder name)
- To create a blank file: touch empty.txt (empty = file name)
- To list the contents: ls
- To create 2600 folders: mkdir -p p{1..2600} (-p = parent directory; p = name)
- To create two files with text: echo “content” > file_name.txt
- To concatenate the files: cat file1.txt file2.txt
Task-3: Working with Github
(https://www.tumblr.com/pushhpa/765475347380748288?source=share) In this task we were required to get familiar with github. We were given a code to debug it and as the access to the main repository was restricted it had to be forked to make changes in the code.
Task-4: 3D Printing
(https://www.tumblr.com/pushhpa/765481144250761216?source=share) 3D printing was my first offline task. In this task we had to download an STL file of our choice and slice it before printing it. So , i downloaded an STL file from thingverse.com and used creality to resize and slice it. Actually watching a 2D image becoming 3D was really fascinating :]
Task-5 Karnaugh Maps and Deriving the Logic Circuit
K- Mapping is a topic that is taught to us in previous classes, it’s a method used to simplify boolean expressions by minimising the number of logical expressions used in a digital circuit. (https://www.tumblr.com/pushhpa/765483713697136640?source=share) In this task we were required to blink the led or burglar alarm at a certain condition using K-Map.
Task-6: Writing Resource Article using Markdown
Large Hadron Collider:
The Large Hadron Collider (LHC) is a huge machine near Geneva, Switzerland, built to study tiny particles by smashing them together at high speeds. This helps scientists learn about the building blocks of the universe. In 2012, it discovered the Higgs boson, a key particle that helps explain how things get mass. The LHC continues to explore big questions about the universe, like dark matter and what happened after the Big Bang. (https://hub.uvcemarvel.in/article/0f54dcc5-14b5-4e14-848f-804a06fec61d)
Task-7: Datasheets Report Writing
L293D motor driver
Introduction:
The L293D is integrated circuit (IC) designed to drive DC motors, stepper motors, and other inductive loads, commonly used in motor control applications due to its ability to provide bidirectional control of motors with high current capabilities.
Features:
- High-Current Half-H Driver: Capable of driving four separate DC motors or two stepper motors.
- Bidirectional Control: Allows control of motor direction and speed.
- High Current Handling: Provides up to 600 mA per channel with peak currents up to 1.2 A.
- Logic Voltage Compatibility: Operates with a wide range of logic voltages.
- Thermal Shutdown: Provides thermal protection to prevent overheating.
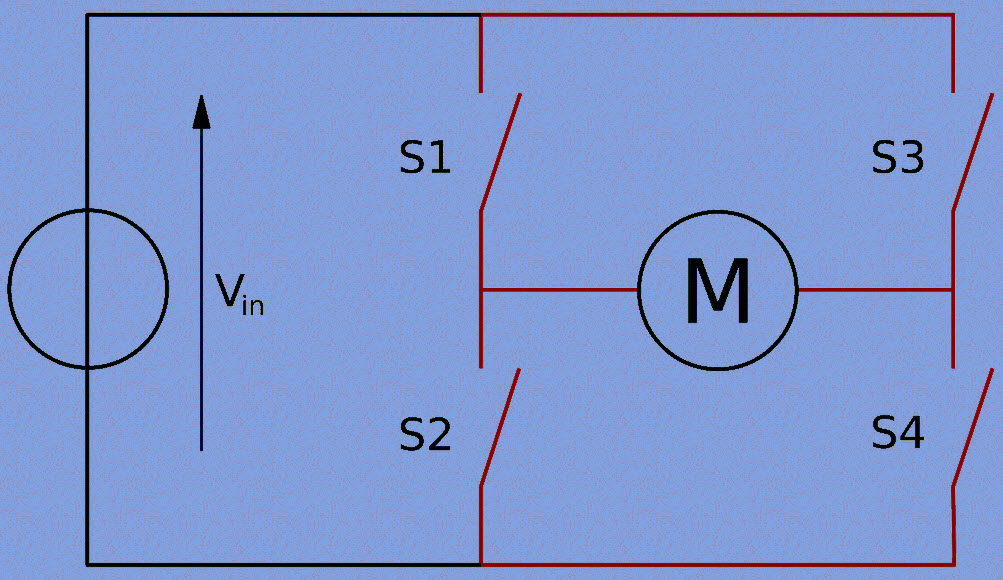
H-Bridge:
A H bridge is an electronic circuit that allows a voltage to be applied across a load in any
direction. H-bridge circuits are frequently used in robotics and many other applications to
allow DC motors to run forward & backward. The H-bridge circuit is composed of four
switches arranged in an "H" configuration. These switches can be transistors, MOSFETs, or
relays.
 The operation of the H-bridge is as follows:
The operation of the H-bridge is as follows:
- Forward Motion: To move the motor in one direction, switch S1 and S4 are closed while S2 and S3 are open. This allows current to flow from the positive supply through the motor, then through S4 to ground.
- Reverse Motion: To move the motor in the opposite direction, switch S2 and S3 are losed while S1 and S4 are open. This reverses the current flow through the motor.
- Brake: To stop the motor, both pairs of switches (S1 and S2, or S3 and S4) can be closed simultaneously, which shorts the motor terminals together, effectively braking the motor.
- Coast: When all switches are open, the motor is effectively disconnected from the power supply and allowed to coast to a stop.
- S1 and S2 are switches controlling the current direction.
- S3 and S4 are switches used for braking or coasting.
PWM: Pulse Width Modulation
It is a method to control the speed and direction of the motor. Microcontroller is used to generate a pwm signal on the enable pin of the L293D IC, the duty cycle of the PWM signal will control the speed of the motor- higher the duty cycle, faster the speed of the motor.
Frequency:
Frequency is the number of PWM cycles per second and it ranges from 1kHz to 20kHz.
Task-8: Active Participation:
(https://www.tumblr.com/pushhpa/765480628866187264?source=share)
Picture 1:
I had attended an IoT workshop held in UVCE by ECell UVCE, there i learnt how we can control a led bulb and also change its colour by just taping in our mobile phone and it made me understand the significance of IoT in real life and also it was my 1st time seeing an ESP32 IC!
Picture 2:
The ADCOM event held at IIIT-B was about various technologies in the AI industry, i got to know about the event through friends to volunteer for the event. And got the opportunity to get an idea about how corporate meetings are held and it was a great time being there.
Picture 3:
FCI- Fund a Child in India conducted a draw your dream event for primary school kids where i volunteered. This event was very successful and i was really happy to volunteer the kids, its hard to control the children but it was fun to interact with them and their drawings were very good.
Picture 4:
5K run was the event conducted in UVCE and in this event i got to interact with the alumni of our college and it was a great experience overall.
Task-9: 555 Astable Multivibrator
Multivibrator is a circuit used to implement two state devices (oscillator, timer, flip-flops). In Astable Multivibrator both the states are unstable therefore generating a square wave output without the external trigger.
Pin Configuration
- Pin 1 (GND): Ground.
- Pin 2 (TRIG): Trigger input, connected to the junction of R1 and R2.
- Pin 3 (OUT): Output, provides the square wave.
- Pin 4 (RESET): Reset input, typically tied to VCC to avoid unwanted resets.
- Pin 5 (CTRL): Control voltage, often connected to ground via a small capacitor (e.g., 10 nF) to stabilise the voltage.
- Pin 6 (THRS): Threshold input, connected to the junction of R2 and C1.
- Pin 7 (DISCH): Discharge pin, connected to R1.
- Pin 8 (VCC): Power supply. ####### Duty Cycle: (R1+R2)/(R1+2R2) T = t1+t2 t1 = 0.693(R1+R2)C t2= 0.693(2R2)C (https://www.tumblr.com/pushhpa/765481057178042368?source=share)