
COURSEWORK
Anagha's AI-ML-001 course work. Lv 3
| Anagha Raghavan | AUTHOR | ACTIVE |
General Task Report- Anagha Raghavan
2 / 1 / 2025
TASK 2 : API
API (Application programming Interface) is a messenger which takes requests from you and returns the response. It does so by sharing data between the application. It basically helps in communication between two software components. I made a weather application in javascript using OpenWeather API.
TASK 3: WORKING WITH GITHUB
I familiarized myself with github environment, forking, pulling requests and how changes are made.
STEPS
- First i forked the main repository.
- Then i cloned it and created a branch
- I made the changes in the code on VS Code and also staged and committed them.
- Now this changes are pushed to github
- Go to the main repository and pull request.

TASK 4: GET FAMILIAR WITH THE COMMAND LINE ON UBUNTU:
I first familiarized myself with different Linux commands.
Next i proceeded on to complete the given task, where i created a folder , in which i created 2600 subfolders and two text files.
Further, i concatenated the two text files and showed the result on terminal.

.jpeg?raw=true)
TASK 5: KAGGLE CONTEST
I familiarized my self with the task , where we had to make an ML model to try and predict the number of passengers survived.
First criteria considered for this purpose was the gender of the passengers, where the assumption was that the female passengers survived. Then the survival rate of the passengers were calculated.
Then the model was trained by 'Random forest classifier', a machine learning model to make predictions
My score was 0.77511

TASK 6: PANDAS AND MATPLOTLIB
I learnt about the pandas library and particularly about the data frame functions in it. I also learnt about the matplotlib library which is used for plotting charts. I used both these libraries and created a dataset as shown below.
- Bar graph

- Scatter Chart

- Pie chart

- Line Graph

TASK 7: PORTFOLIO WEBPAGE
First i familiarized myself with the html syntax
Then i styled it using internal css.
 Link for the code:
https://github.com/Anagha2476/marveltasks/blob/main/portfolio%20webpage
Link for the code:
https://github.com/Anagha2476/marveltasks/blob/main/portfolio%20webpage
TASK 8: TINKERCAD
It is a web based tool for simulation of 3d designs, circuits and code blocks. It was a really fun experience working on it where i created an ultrasonic sensor CONNECTIONS:
Ultrasonic sensor --------------------Arduino UNO
VCC------------------------------------------ 5V
TRIG ---------------------------------------- pin 7
ECHO----------------------------------------- pin 6( PWM pin)
GND -------------------------------------------GND
.
Servo Motor --------------------------------Arduino UNO
Ground -----------------------------------------GND
Power -------------------------------------------5V
Signal-------------------------------------------- pin2
CODE BLOCK:
 Video of simulation of my project:
(The servo pin shall rotate when the distance between object and sensor becomes less than 80cm)
Video of simulation of my project:
(The servo pin shall rotate when the distance between object and sensor becomes less than 80cm)
TASK 10 : SPEED CONTROL OF DC MOTOR
First i learnt about the output, input and enable and power pins of L298N motor driver .
I learnt about which pins control speed and which control direction.
I also learnt about the pins of potentiometer.
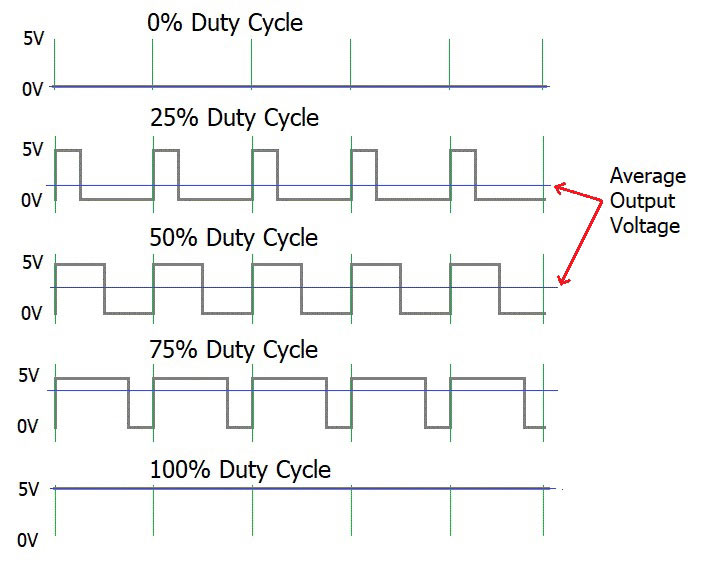
I familiarized myself withe the concept of PWM and duty cycle.
I made the necessary connections and finally got the output as shown.

TASK 11: LED TOGGLE USING ESP32
First I familiarized myself with the ESP32
I made the connections.
Then I uploaded the code in Arduino IDE and gave my network credentials
I got the IP address for the web server showed me a serial monitor. Using the ON/OFF buttons on the server, we can check the working https://youtube.com/shorts/3lMpaTfZ5c8?si=gYnxyNQdBKNB_qe-
TASK 12: SOLDERING PREREQUISITES
First i learnt about the soldering tools
I learnt about soldering iron, solder, flux etc.
I mounted the components that is led and the resistor to the the circuit board and then soldered it.
Below is the picture of the performed task.

TASK 13: 555 IC ASTABLE MULTIVIBRATOR WITH 60% DUTY CYCLE:
I first learnt about the 555 IC. Its circuit and working.
To achieve 60% duty cycle i calculated the ratio of the resistances required. It was 1:2.
 Accordingly i took the following components:
Accordingly i took the following components:
R1= 33e
R2=68e
C1 AND C2=0.01 uF
One 555 IC , VRPS and an oscilloscope.
The connections:

I later performed the task to get the output:

TASK 14: KARNAUGH MAPS AND DERIVING LOGIC GATES
First, I understood the working behind the burglar alarm and derived the K-Maps for it.
The truth table:
 The concept behind this is, the burglar alarm rings, only when there is an unauthorized entry, i.e. , when the key is closed but the door is open.
The concept behind this is, the burglar alarm rings, only when there is an unauthorized entry, i.e. , when the key is closed but the door is open.
Next i derived the logic circuit diagram for the same:

Now, I simulated this circuit on Tinkercad :
It is clearly seen that the alarm(led) is switched on only when Door becomes '1' and Key remain '0'.
TASK 15: ACTIVE PARTICIPATION:
I participated in the technical event Kagada 2024, when my team's project was on Hyperloop systems. We made a poster on this topic and presented it on the day of the event.

TASK 16:
L293D is a basic motor driver integrated chip (IC) that enables us to drive a bidirectional DC motor in either direction and also control the speed of the motor. L293D consist of two H-bridge circuit. It is also designed to drive inductive loads such as solenoids, relays and bipolar stepper motors as well.
It is a 16 pin IC, with 8 pins on each side, allowing us to control the motor. It has a supply range of 4.5 to 36V and has a a peak output current of 1.2A.
The pins of L293D motor driver.
 PWM ( Pulse Width Modulation)-
PWM ( Pulse Width Modulation)-
The speed can be controlled by changing the input voltage. PWM is a technique where the average value of the input voltage is adjusted by sending a series of ON-OFF pulses. The average voltage is directly proportional to the width of duty cycle. That is wider the width of the duty cycle, higher is the average voltage and vice-versa.
The enable pins ENA and ENB of the DC motor driver are helpful in controlling the speed of DC motor.
H-Bridge- To control the rotation direction- The spinning direction of a DC motor can be controlled by changing the polarity of its input voltage. A common technique for doing this is to use an H-bridge. A H-Bridge consists of four switches with motor in the center forming a H type arrangement. Closing two specific switches at a time reverses the polarity of the voltage applied to the motor. This causes a change in the spinning direction of the motor.
The IC has two direction control pins for each channel. The IN1 and IN2 pins control the spinning direction of motor A; While IN3 and IN4 control the spinning direction of motor B.
TASK 18: SAD SERVERS - LIKE " LEETCODE" FOR LINUX
A trouble shooting scenario was given : Command line murders.
We must use Linux command lines to cd into different folders and and into different files to find the culprit.
It was a fun experience.
I used the clues provided to find the culprit.
Here is the message which shows I have received after finding the culprit.


TASK 17: VIRTUAL REALITY
Virtual Reality (VR) is a computer-generated environment with scenes and objects that appear to be real, making the user feel they are immersed in their surroundings. It can be perceived through Virtual Reality headset or helmet. The invention dates back as far as the mid-1950s. Since then, there have been subsequent developments in the field
VR is different from Augmented reality.
-
While AR uses a real-world setting while VR is completely virtual.
-
AR users can control their presence in the real world; VR users are controlled by the system. This means, the system controls what users see, hear, and often how they interact, creating an environment that feels isolated from the real world.
-
VR requires a headset device, but AR can be accessed with a smartphone.
-
AR enhances both the virtual and real world while VR only enhances a fictional reality.
Trends in this field :
Hardware- Wireless VR, High resolution display, improvement of graphics and natural input methods through sensors, gloves and bodysuits for deeper involvements are some hardware improvements in the field. Software- There are platforms created to connect in virtual reality spaces. Today various fields including healthcare , defense etc. are using VR for learning or training purposes.
Technology stack: Its includes the various stuff required to develop and build solutions in this field. Some platforms include unity, Unreal engine, software development kits( SDKs) like Oculus SDK etc.
Some Indian companies in this domain include:
-- Simbott
--Tata ELXSI
-- Trezi
--Parallax labs
and many more..

TASK 8: WRITING RESOURCE ARTICLE USING MARKDOWN:
Markdown is an easy-to-use markup language that is used with plain text to add formatting elements to plain text without the use of a formal text editor or the use of HTML tags. I wrote an article on Gravastars, whose link is attached below. https://hub.uvcemarvel.in/article/203a4e12-1c28-404e-930d-440a05f6cf56