
COURSEWORK
Yuvaraj's EV-RE-001 course work. Lv 1
| Yuvaraj Kaniyar | AUTHOR | ACTIVE |
9 / 1 / 2024
##COMMON TASK REPORT
1)Task: Get familiar with the command line on ubuntu and do the following subtasks
I was \pro noob" in knowing about UBANTU and about its command lines. After this course work I know the basics of it and simple use cases of Ubantu command lines.
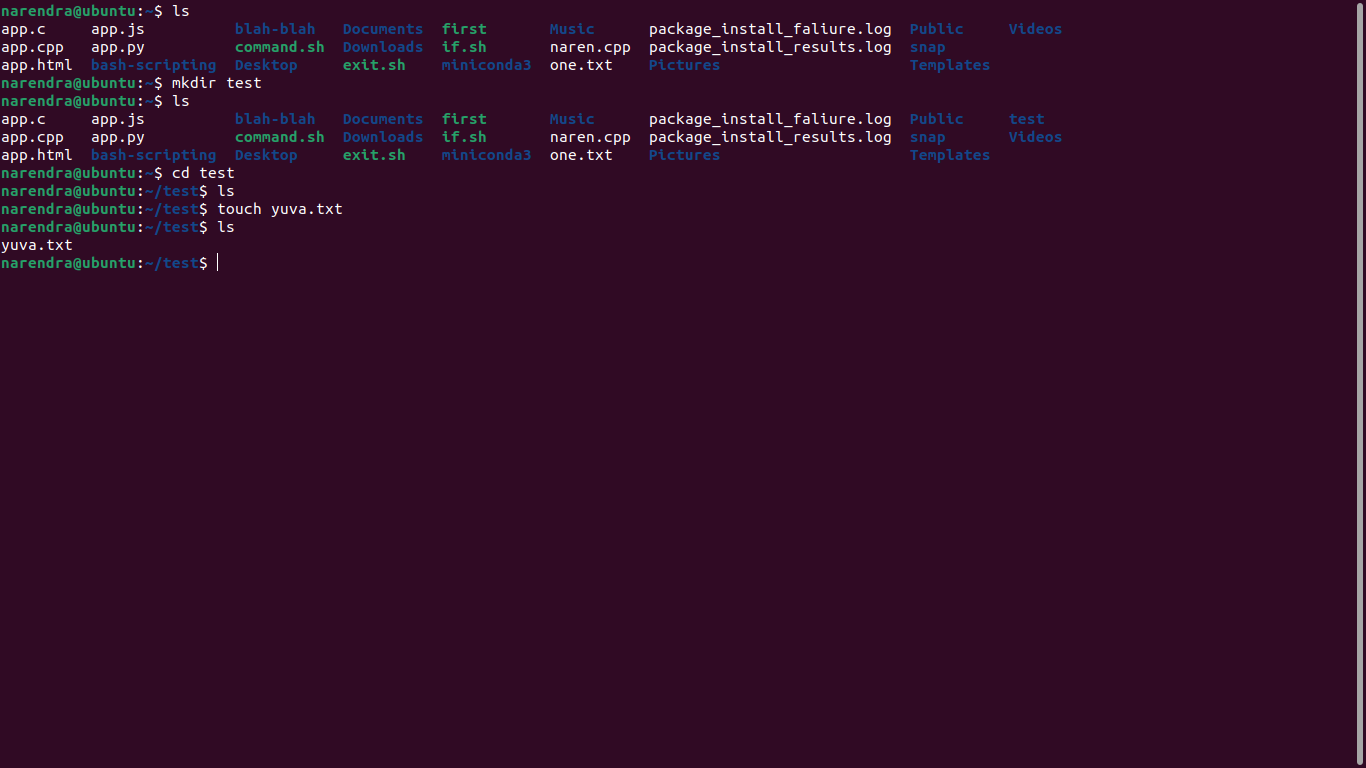
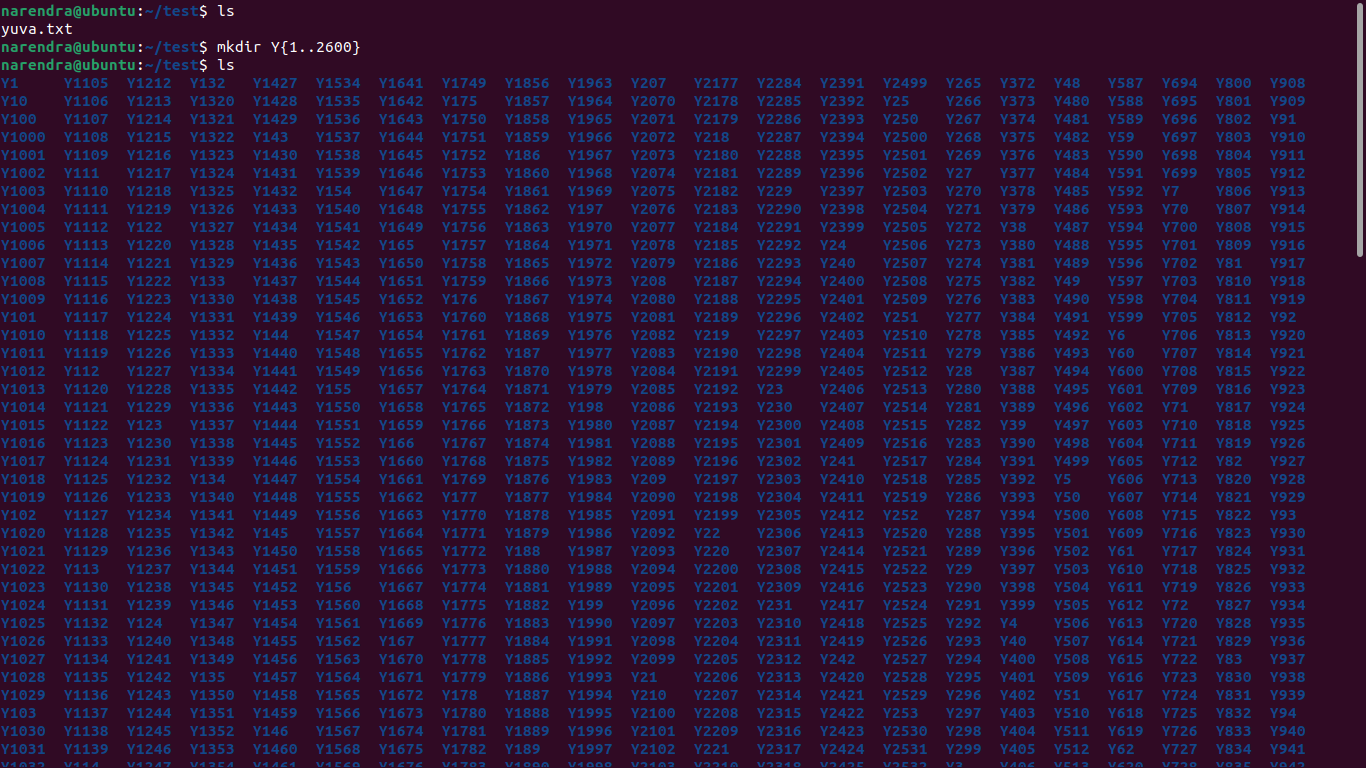
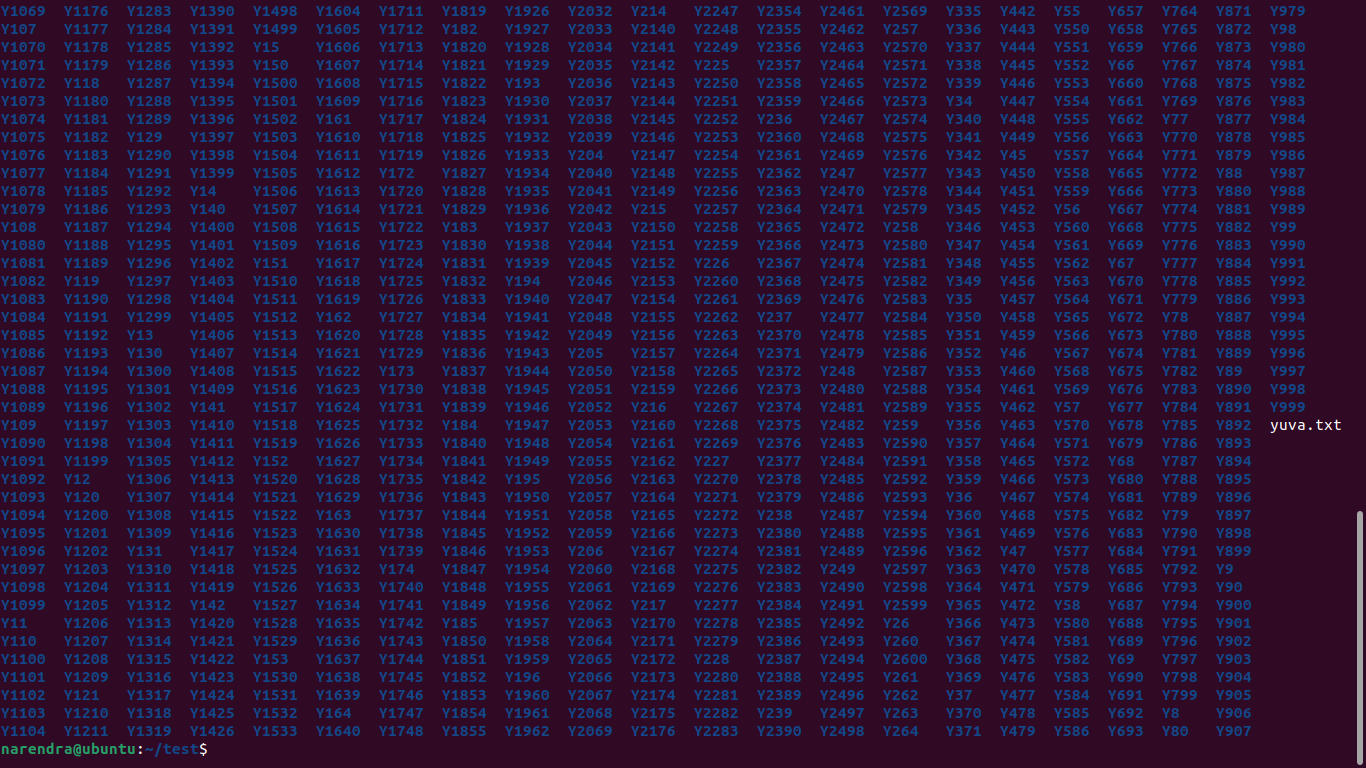
Here I used ls to list the files and folders.
To create folders i used mkdir command and created folder named 'test'.
Then i used cd test to get into that folder.
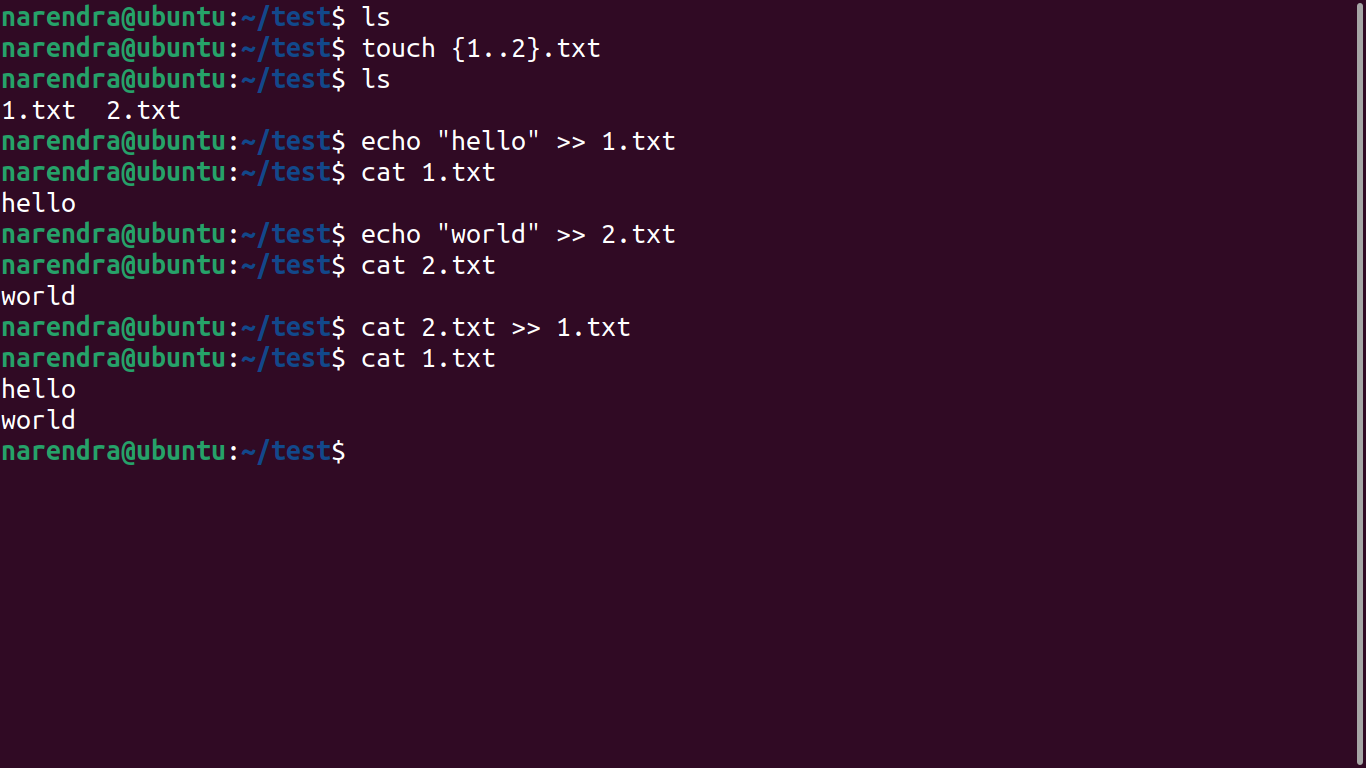
To create files I used touch command and created yuva.txt file.
And I finally used echo command to add text in files and cat command to display the file in it.
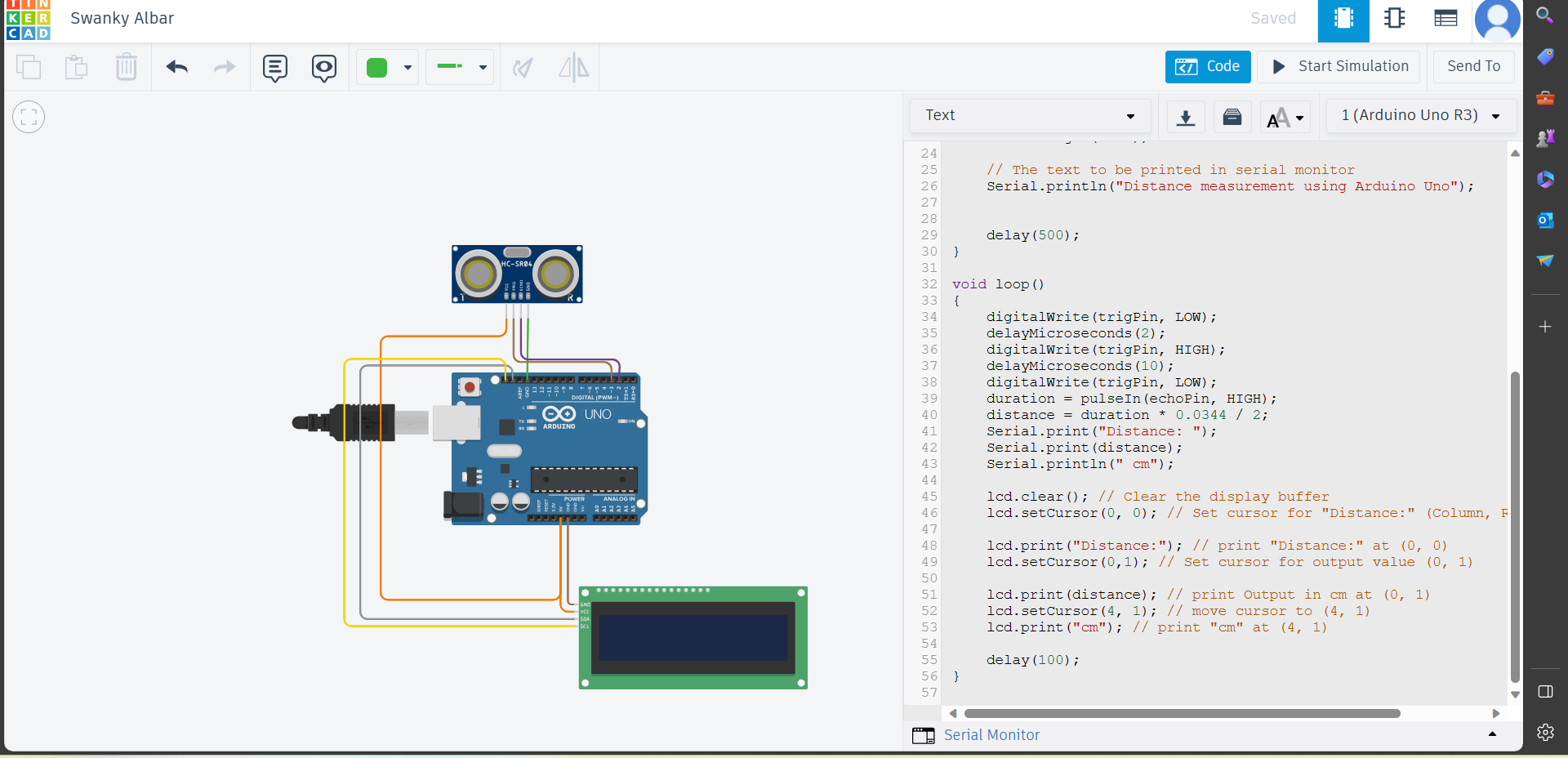
2) Tinker cad
Before getting into Marvel's coursework I was already knew Tinker cad and its basic functions by my friends. It was easy task to me and completed with so much passion.
I have to build a circuit of aurdino uno board and ultrasound sensor with display attached to it which measures the distance at which object is placed Infront of ultrasonic sensor.
I am copied the resource code and completed the circuit diagram and uploaded code to board. I knew basic function of it hence it was easy job to do.
.png?raw=true)
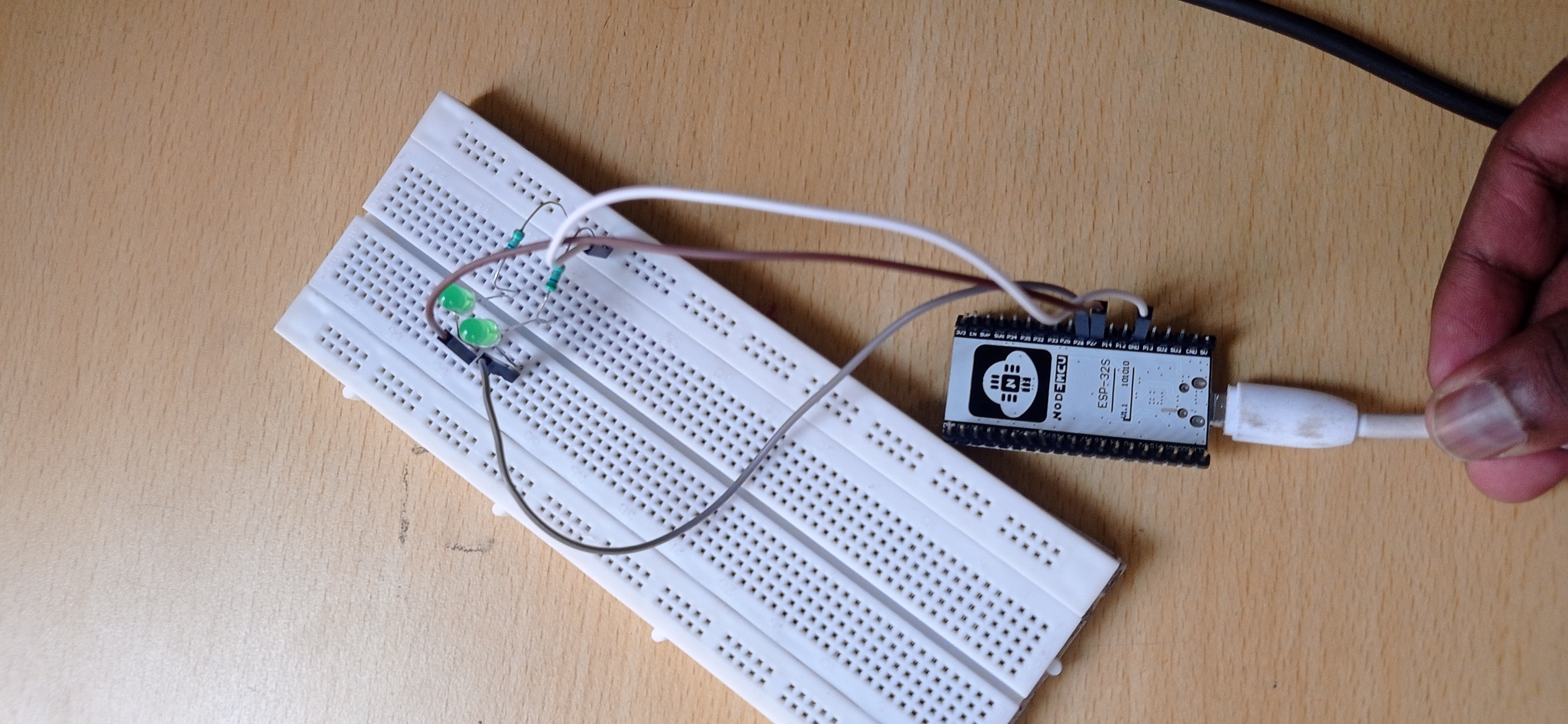
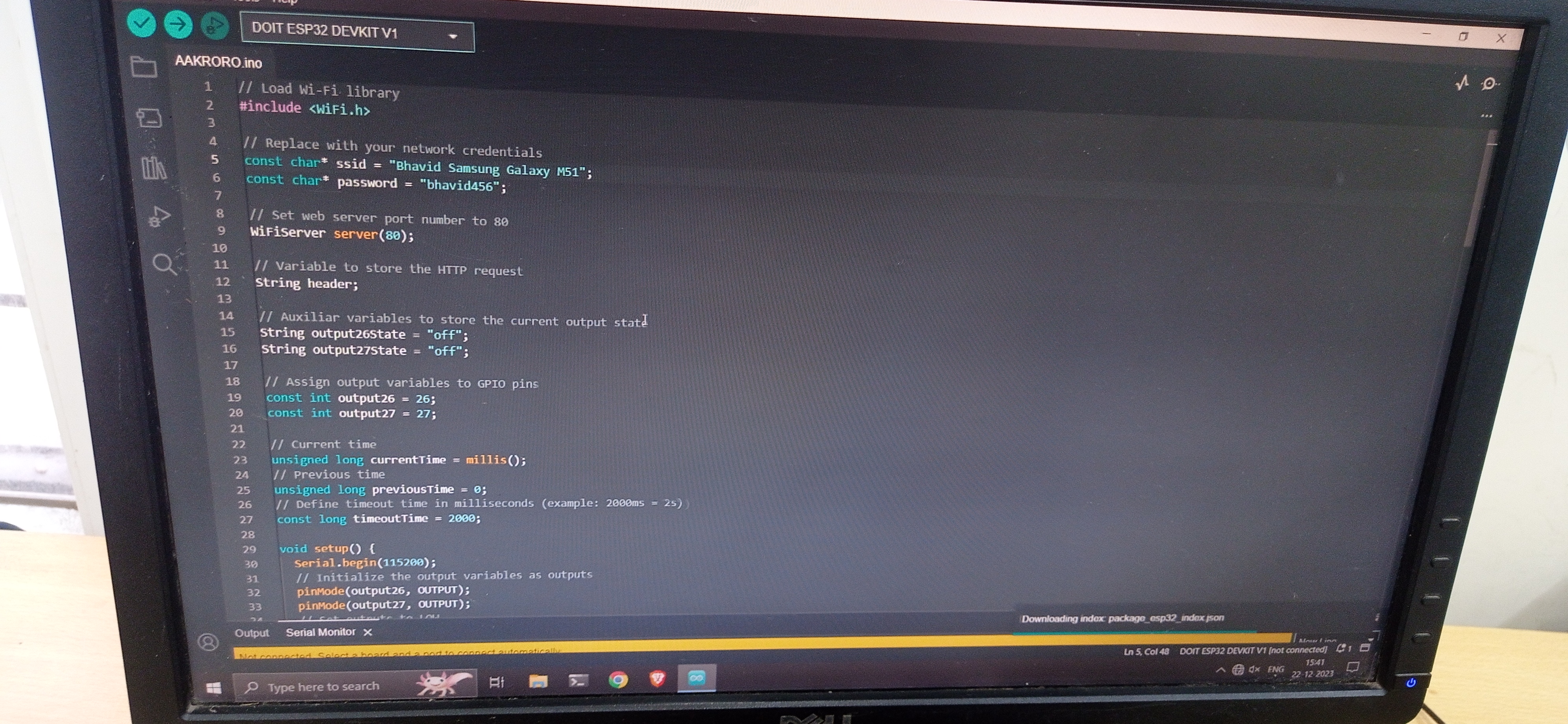
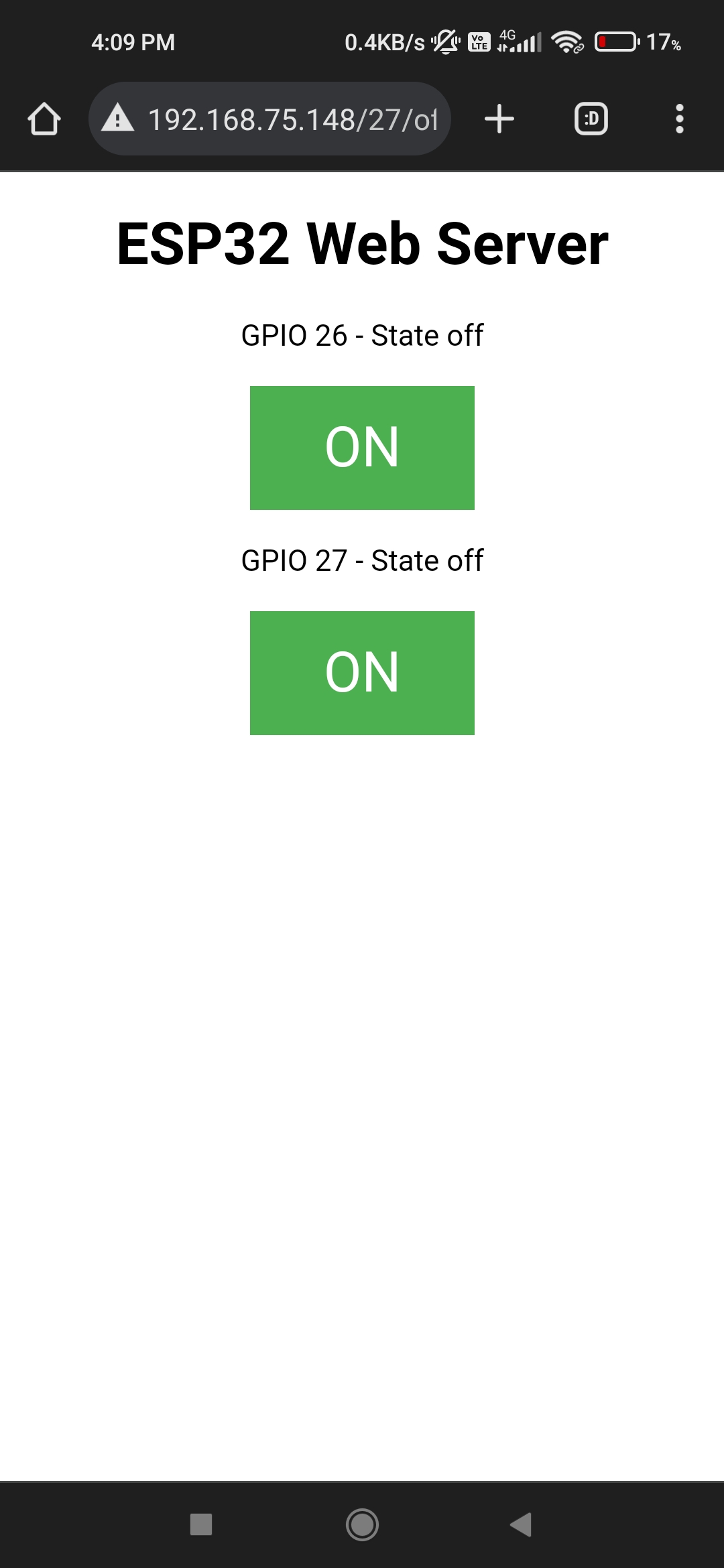
3) LED toggle using ESP32
Here I had to build a web server which can interact with ESP32. Using that connection, I had to control LEDs which was given.
In initial time I wasn't able to do this work but after sometimes with the help of coordinators i learnt it.
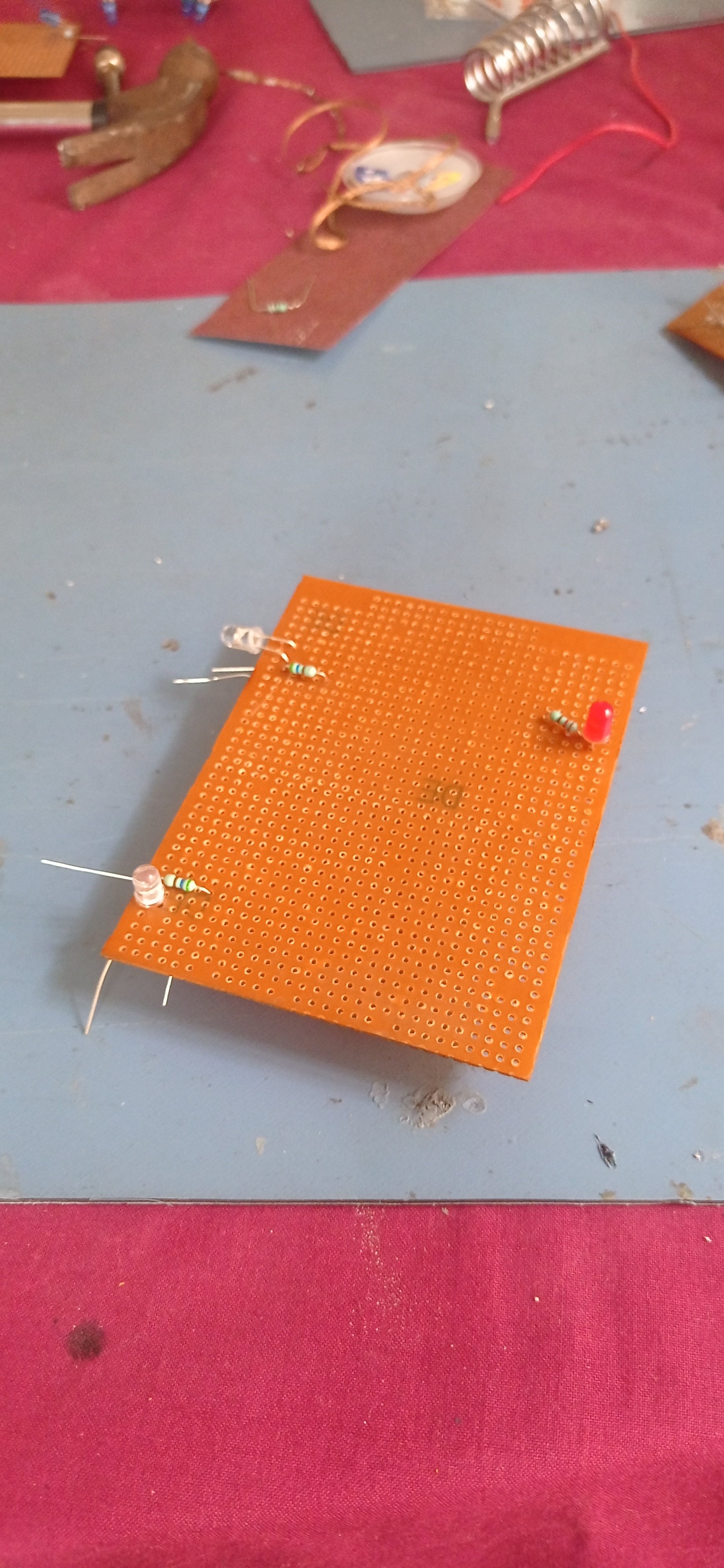
4) Soldering
Learnt basic soldering with perf board by soldering LED to it. Understood the use of flux soldering lead, Sandpaper, and stand used in it.
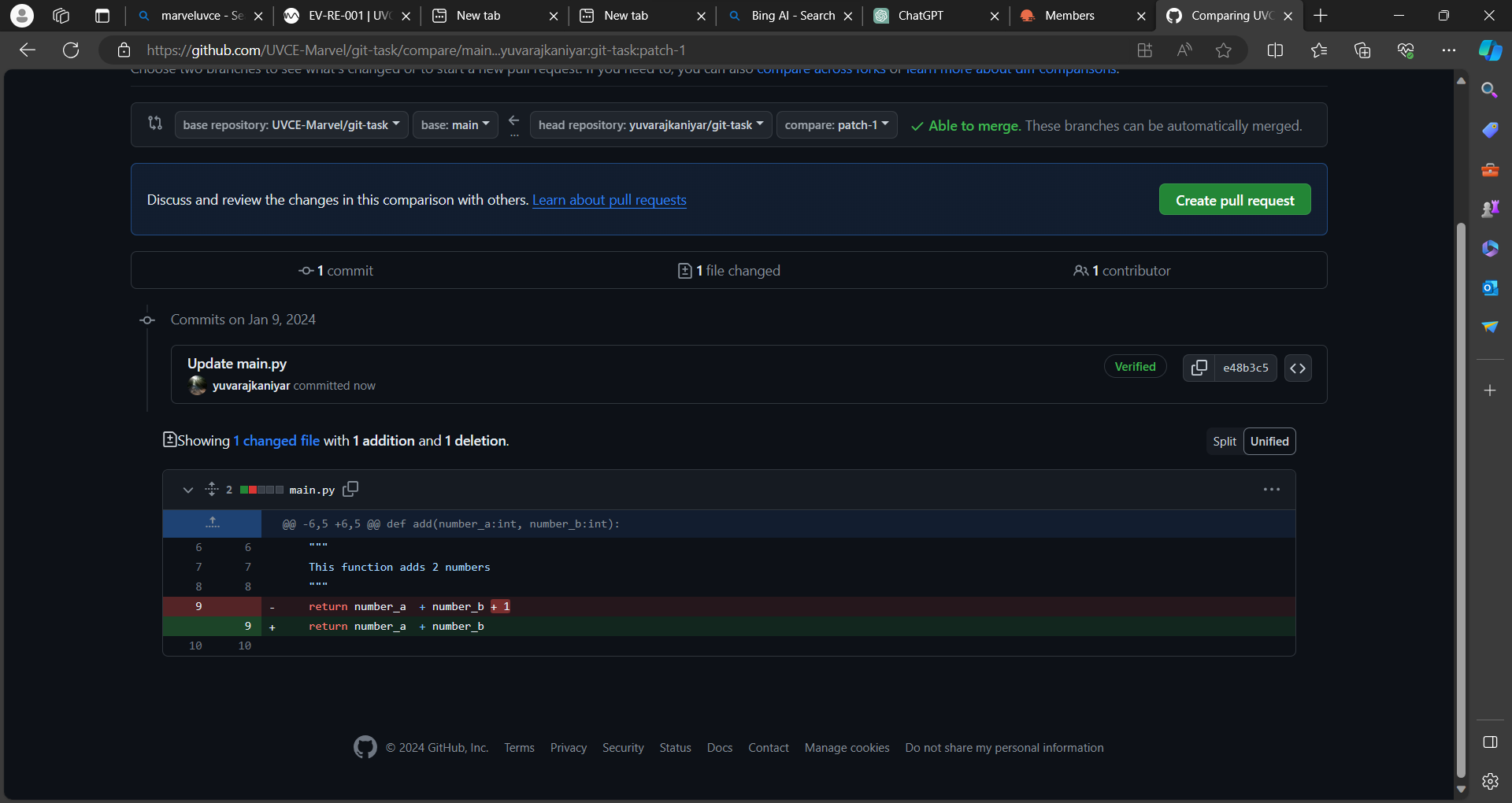
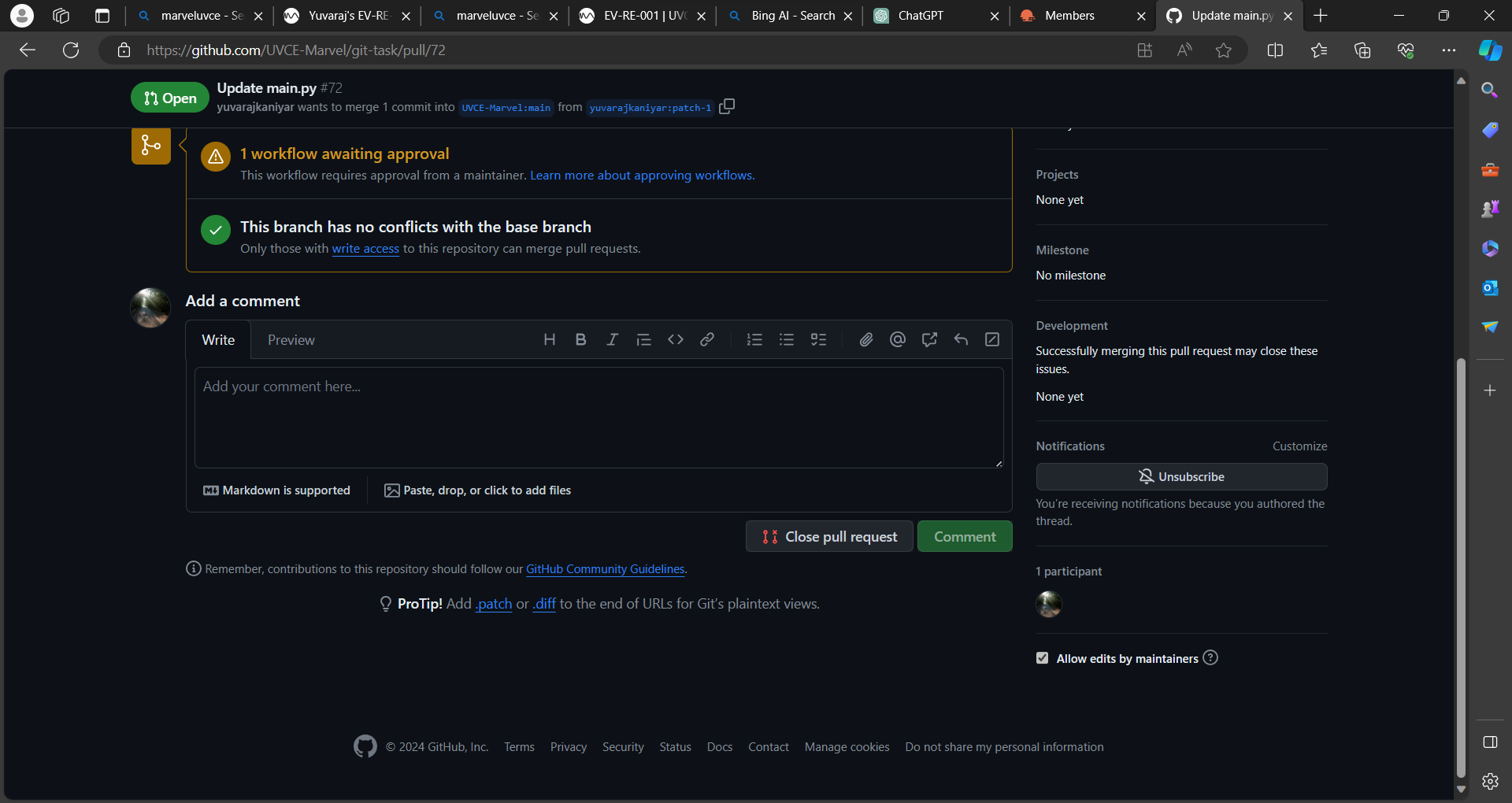
5) Working with GitHub
I knew about GitHub before but didn't knew how to use it. By completing this task with help of my friend and coordinators I got to know how it works and its use case in real-world. I knew basic of C programming, and I was able to understand C++ basics. Here I needed to correct Python code which was very simple, but I dint knew python. But by understanding the logic I was able to solve it.
6) Article using markdown
https://www.kaggle.com/code/yuvarajkaniyar/notebooke74827885b This is the link of markdown article created by me and which was uploaded to kaggle website. This article is also published on marvel website. I learnt this to understand writing article here.
#heading1 ##heading2 and etc.. ` here these are used for headings. And
[image name](link of image)
This is used to insert image in article.
To write bold letters we use bold And to write italic we use italic
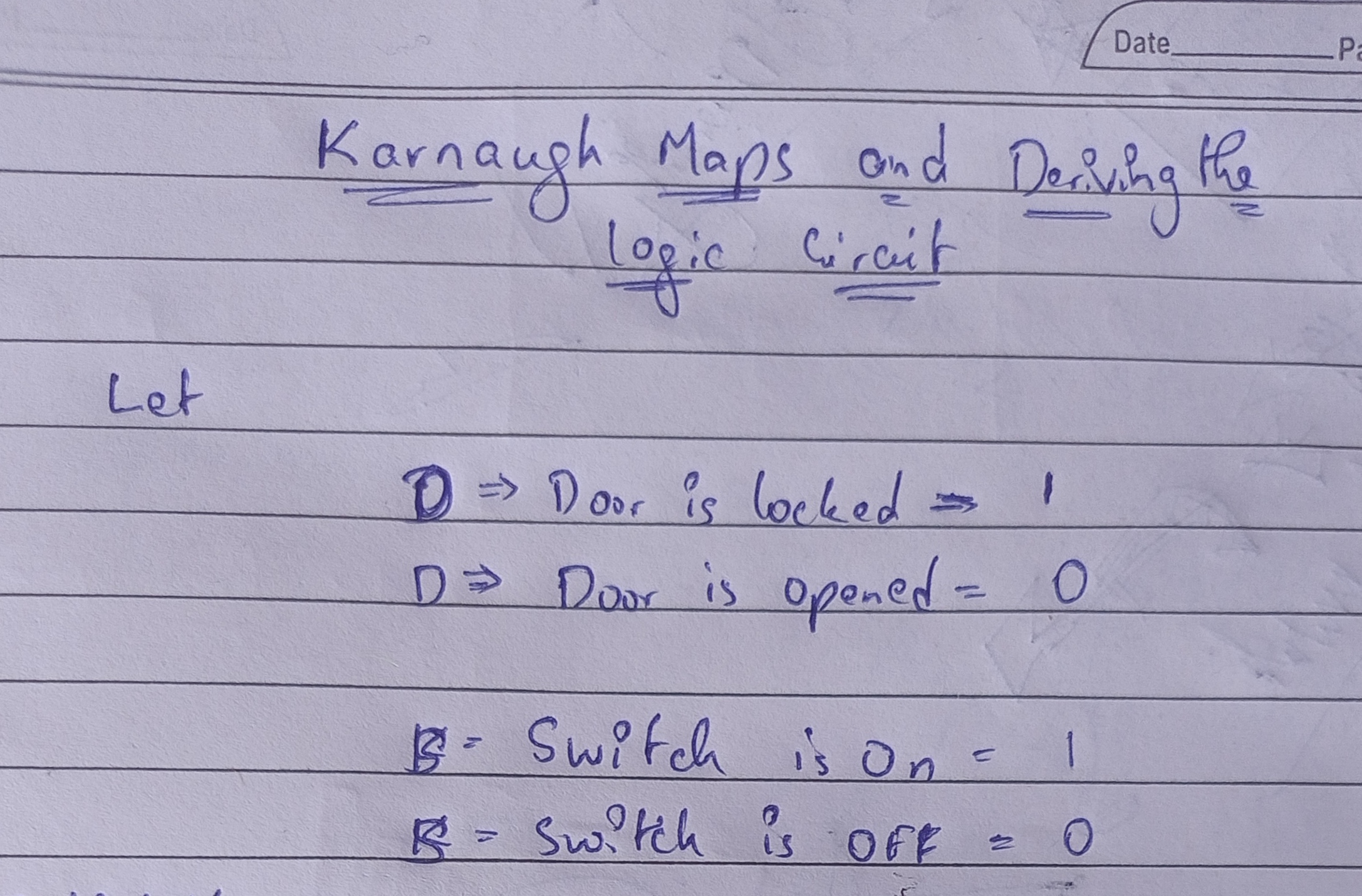
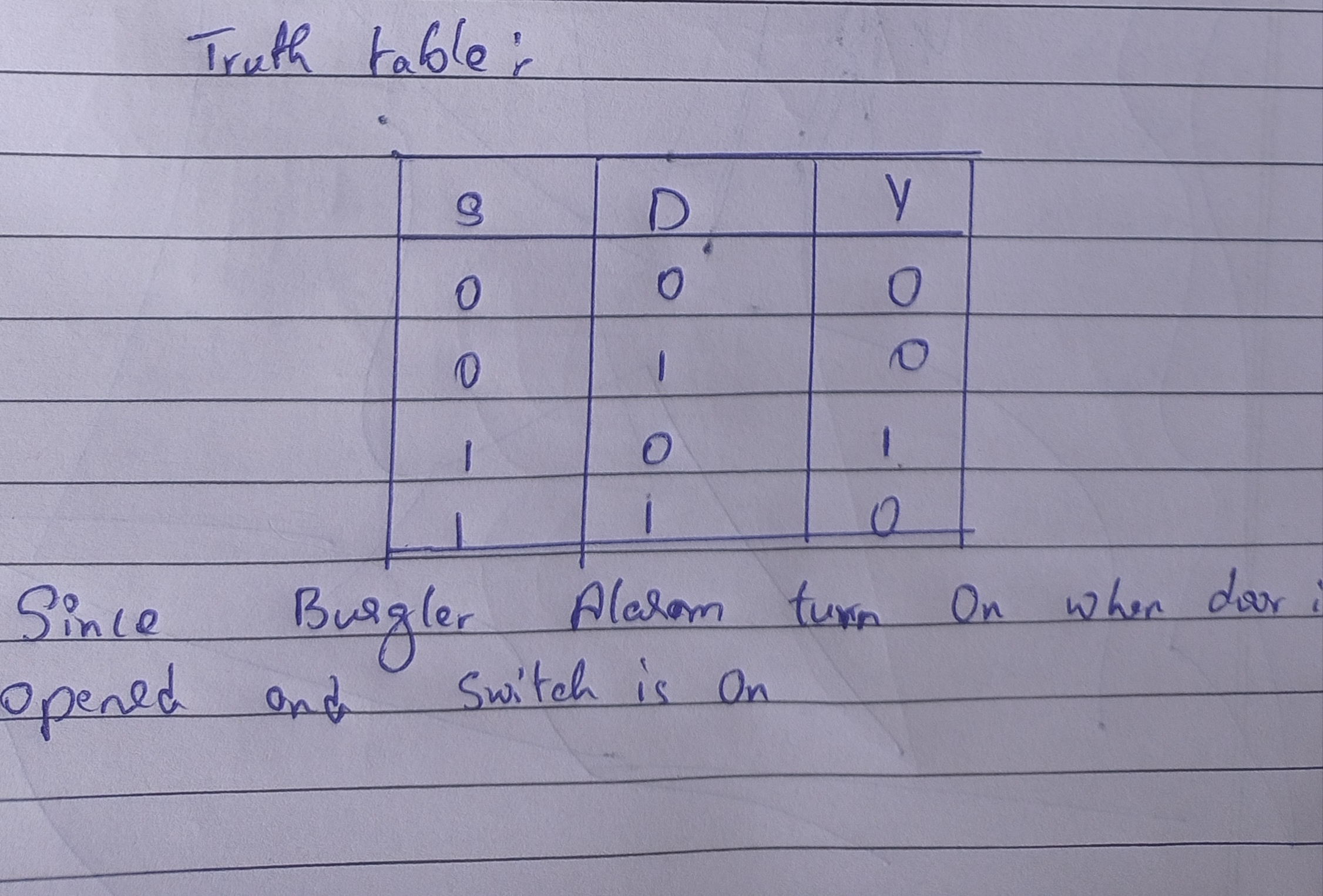
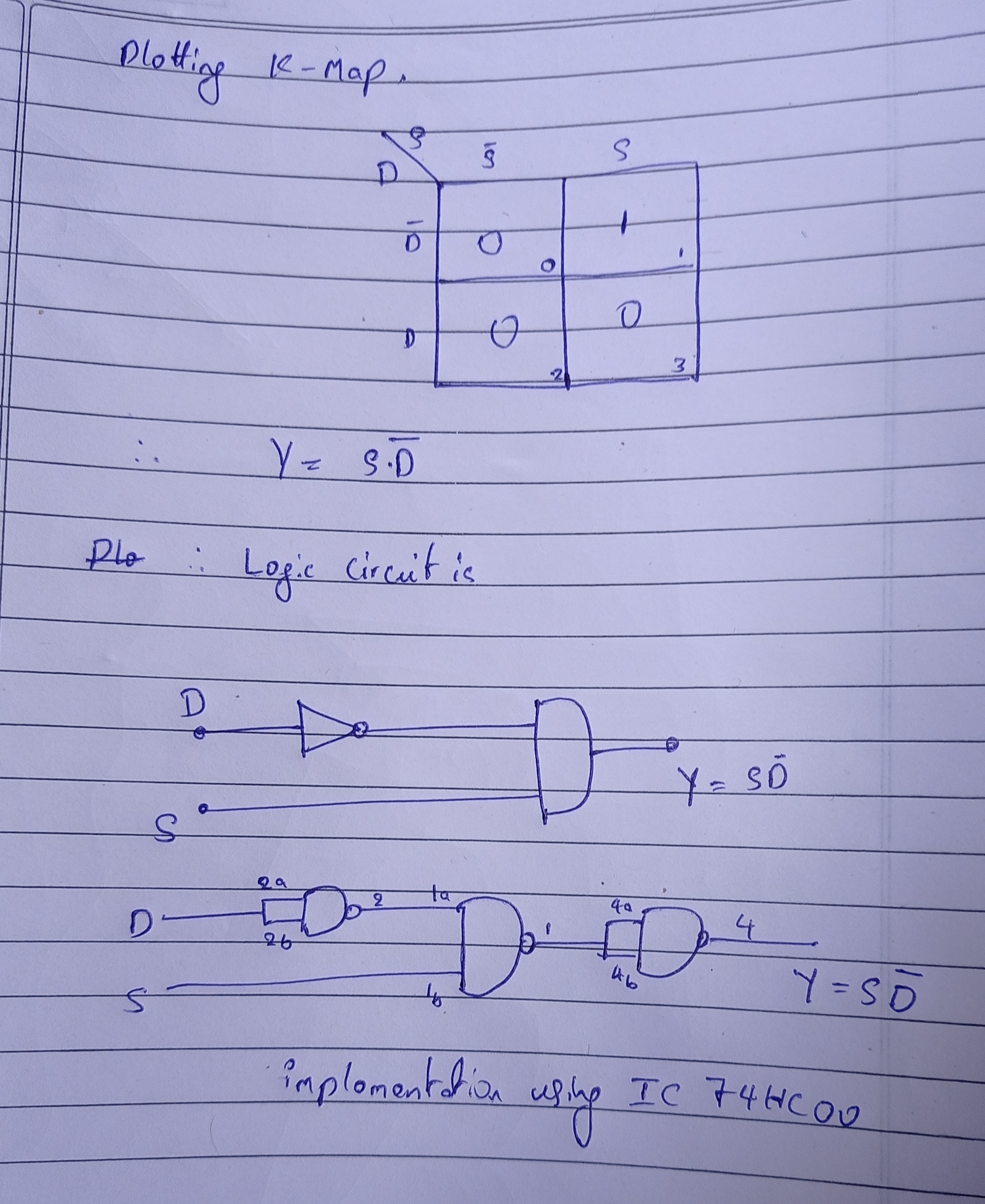
7)K map and deriving logic circuit
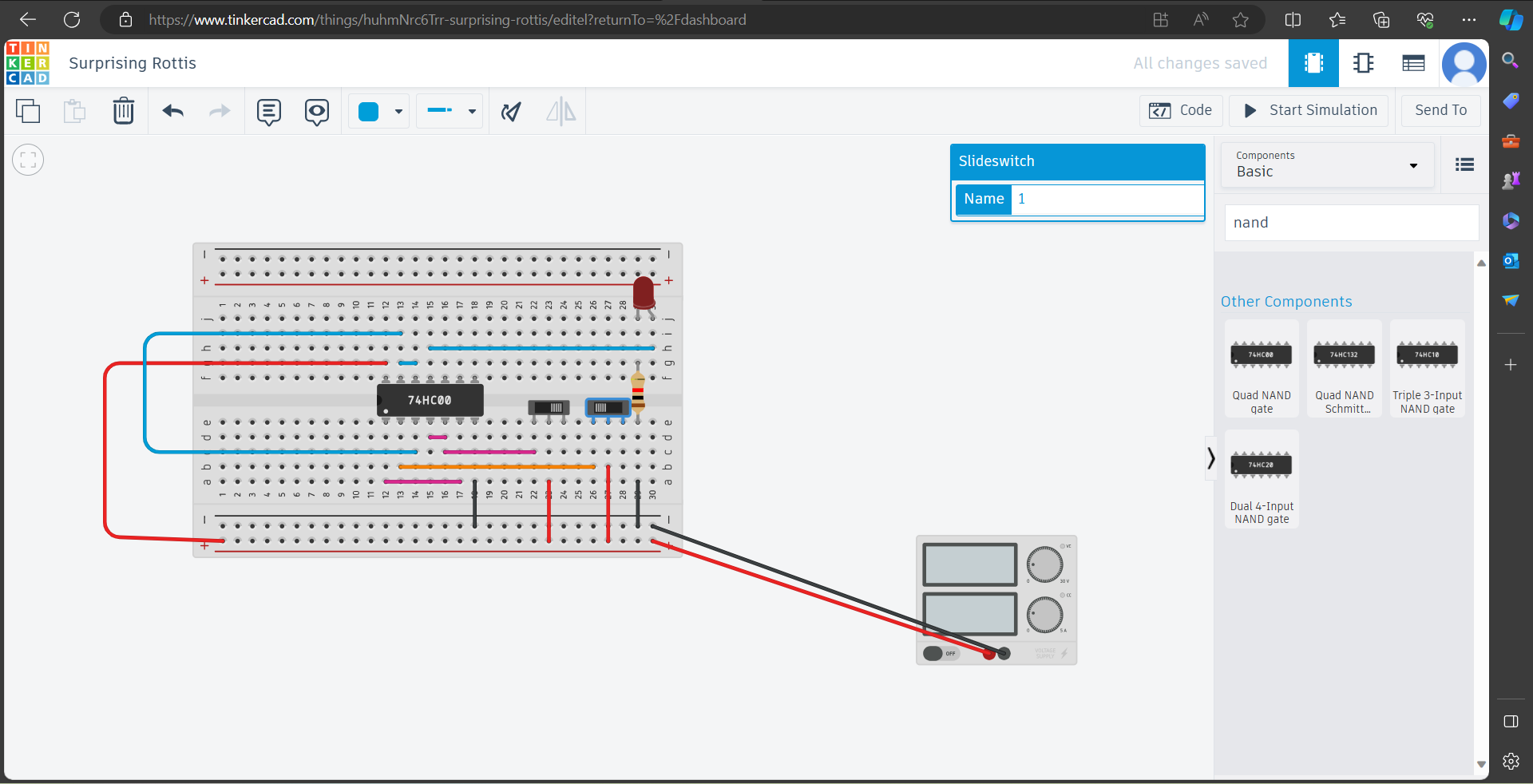 In this task i had create a logic circuit using kmap which functions like a bugler's alarm.
The alarm must turn when door will open and switch is closed.
here is the excecution of this function.
In this task i had create a logic circuit using kmap which functions like a bugler's alarm.
The alarm must turn when door will open and switch is closed.
here is the excecution of this function.
8) Design a Astable multi Vibrator
In this task we needed to generate signals for given value of frequency and for desired structure. here we used IC555 which is combination of SR flipflop, a op-amp and transistor. To give input fixed voltage of 5v we used aurdino board.


9) Active Participation:
Participated in inter college level competition impertus 23 conducted by UVCE. Here participated in Hack a maze competition where built maze solving robot.

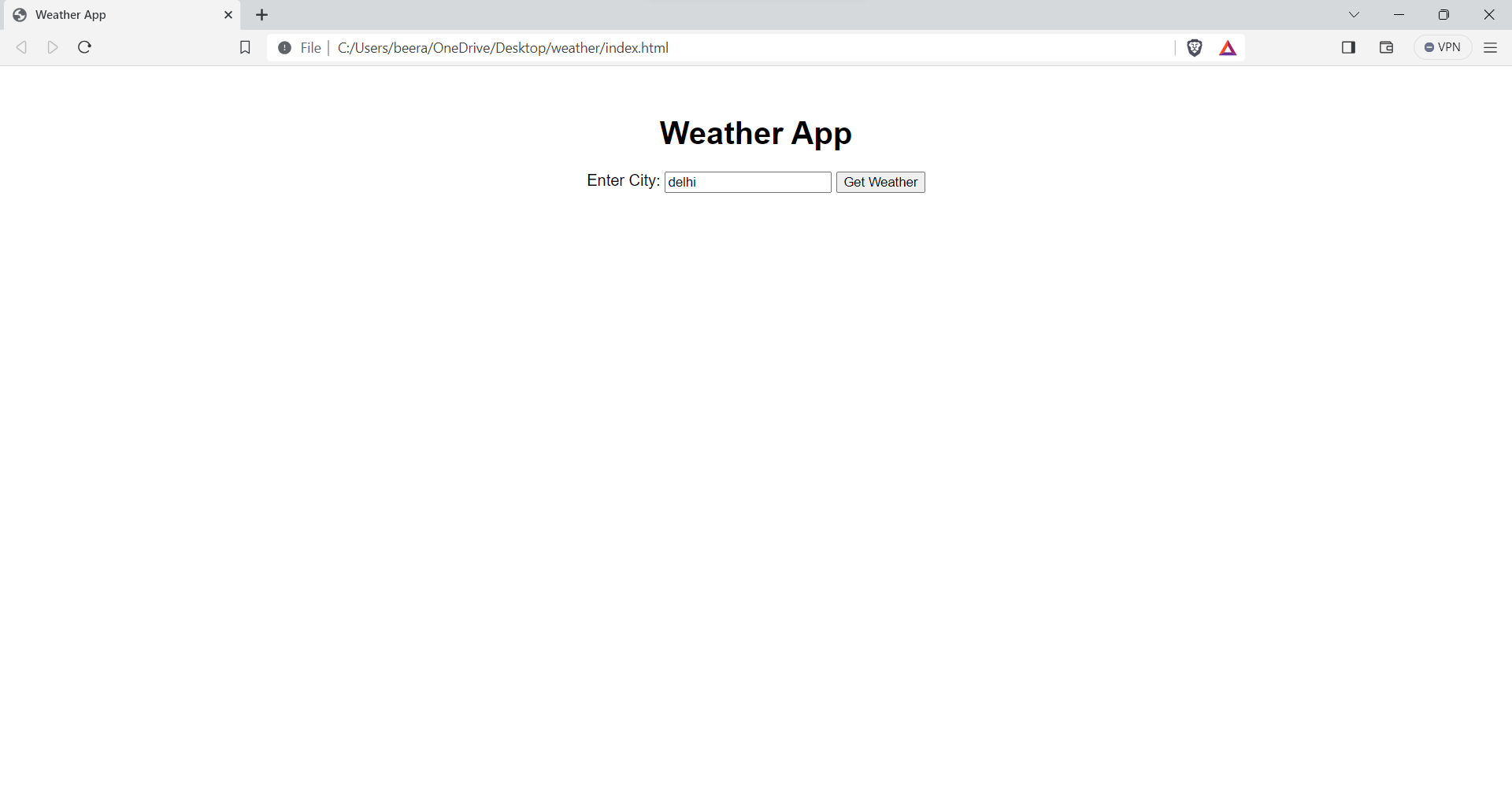
10) API
In this task I learnt the importance and method of using Api keys in simple applications like whether app.
here i am not totally successful but i did my best to get the output which was needed actually.
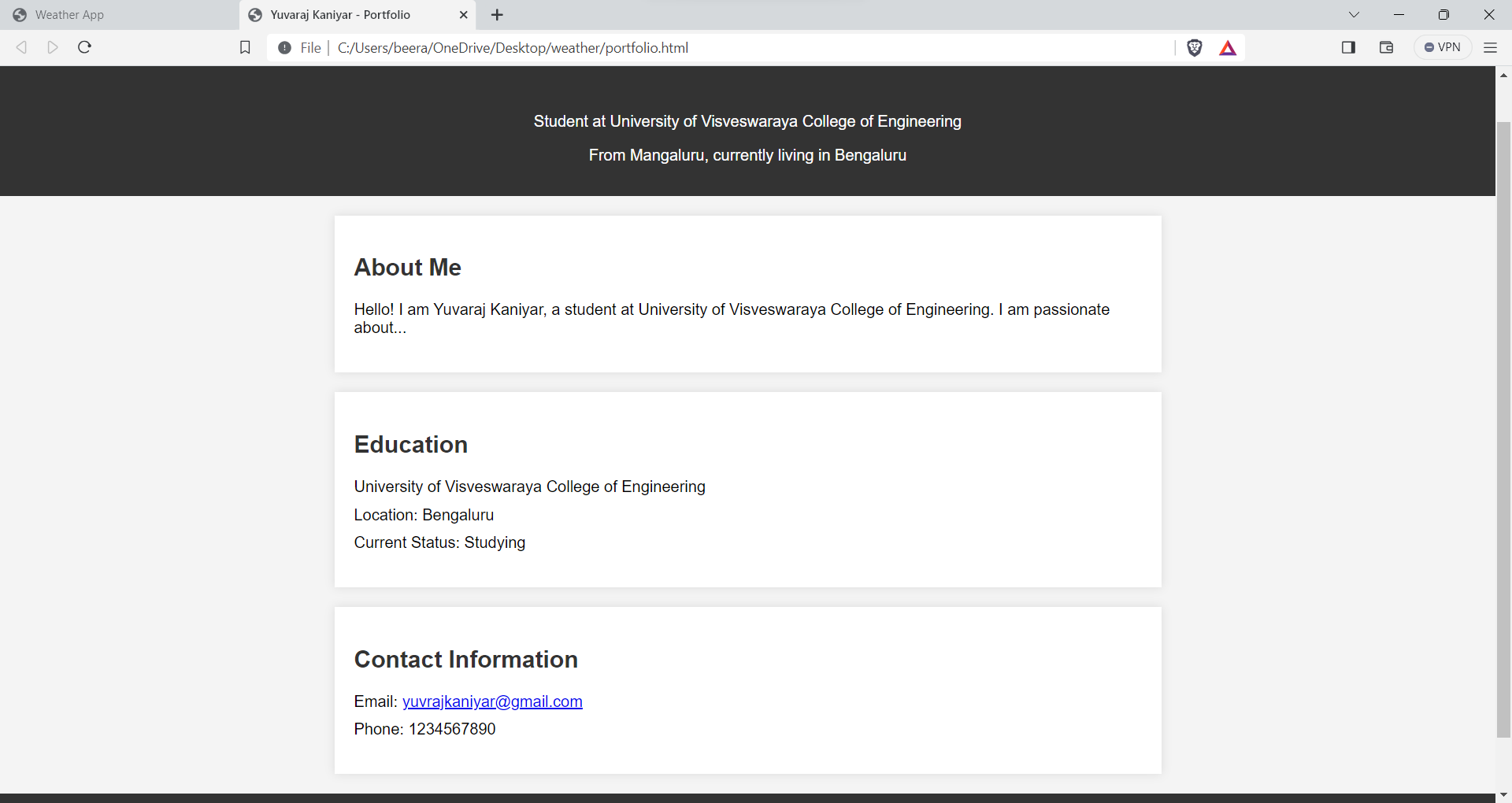
11)Portfolio Website
In this task i have created a portfolio website using html language. Here i am mentioned the basic details of me.
##LEVEL 1 TASKS REPORT
Task 1 ULTRASONIC SENSOR
The Ultrasonic sensor is the sensor which measures distance between the object and sensors using ultrasound signals. Arduino board attached to sensor will analyze the time taken to transmit and receive signal back and give distance as output. To get distance as output we can use different library files attached to code. I used Ultrasonic.h library file because it was more convenient to use.

Task 2 TEMPERATURE DETECTION
LM35 is the temperature detecting sensor which will give voltage output proportional to the Temperature. Using arduino board with simple library we can calculate the Temperature around BJT (sensor). We can calculate temperature from -55'c to +155'c.


Task 3 TEMPERATURE AND HUMIDITY DETECTION
DH11 is the sensor with 3 terminals ( VCC Gnd and Data) with will measure surrounding temperate and humidity. Here I wrote a simple code to measure temperature and humidity. Accuracy is higher than analog sensor.


Task 4 BATTERY CHARGING
This one was the simple task in which I needed to charge lithium polymer batteries using solar panel. For that I used Li ion battery charging module which will regulate the power supply to the battery and keep it safe. I used voltage step-up boost module to get constant output power of 5VA to change my mobile.


Task 5 UNDERSTANDING 555 TIMER AND LDR
In this task I have built a basic Headlight Circuit which turns on when there is no light in the surrounding. For that I used IC555 timed and LDR sensor which will detect the amount of light in surrounding. whenever there is no light in surrounding LED will start lighting up. Since there was no 47ohm sensor in my kit I used 4 220 ohms resistors and connected in parallel to get approx 47 ohms resistance.

Task 5 SPEED CONTROL OF DC MOTOR
###Task 6 DIRECTION CONTROL OF DC MOTOR


7 Task 7 POINT TURN OF A VEHICLE

"