
COURSEWORK
Mohammad's CL-CY-001 course work. Lv 2
| Mohammad Ayaan Khan | AUTHOR | ACTIVE |
Mohammad Ayaan Khan's Level 0 Report
19 / 3 / 2026
Task 1: 3D Printing
This task provided a theoretical foundation in Fused Deposition Modeling (FDM) and the software-to-hardware pipeline. The primary focus was on translating digital 3D geometry into manufacturing instructions by processing .STL meshes through slicing software to generate precise G-code toolpaths. The study involved analyzing critical print parameters, including balancing infill density for structural integrity versus material efficiency, and understanding extruder and heated bed temperature calibrations for PLA filament. Finally, the lab's Standard Operating Procedures (SOPs) were reviewed to understand the protocols required for physical fabrication.
Task 2: API
This task explored the fundamental mechanics of Application Programming Interfaces (APIs) by establishing a client-server connection with a third-party REST endpoint (The Cat API). A minimal web client was developed using strictly HTML and Vanilla JavaScript. The architecture utilizes the asynchronous Fetch API to execute HTTP GET requests without blocking the main execution thread. Upon receiving the payload, the script parses the JSON data, extracts the target image URL, and dynamically injects it into the Document Object Model (DOM). This provided a practical understanding of how decentralized systems communicate over the web.
Task 3: Version Control & Continuous Integration Workflows
This task focused on version control and automated pipeline execution using GitHub. The objective involved navigating an existing repository, utilizing GitHub Issues for bug tracking, and resolving a documented codebase error. After the fault was diagnosed and patched locally, a formal Pull Request (PR) was initiated to propose and merge the patch. Furthermore, the exercise provided practical exposure to GitHub Actions, demonstrating how CI/CD workflows are triggered to automatically build, test, and validate code upon commit.
.jpg)
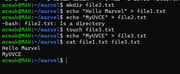
Task 4: Linux Command Line Interface (CLI) & Bash Automation
This task focused on interacting with the Ubuntu operating system entirely through the Command Line Interface (CLI). Standard POSIX commands were utilized for directory creation (mkdir), spatial navigation (cd), and non-interactive file generation (touch). A technical highlight was utilizing Bash brace expansion (mkdir {A..Z}{1..100}) to programmatically generate 2,600 uniquely designated directories in a single computational cycle. Finally, the task covered standard I/O redirection and the use of the cat utility to concatenate and stream the contents of multiple text files directly to the terminal.

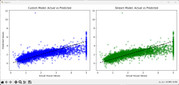
Task 5: Custom Linear Regression & Gradient Descent Optimization
For this task, a custom Linear Regression model was developed from scratch using Batch Gradient Descent to predict California Housing prices. To ensure optimization stability, a standard normal distribution was applied to the input features using StandardScaler. The custom model's predictive accuracy achieved near-parity with Scikit-Learn's optimized OLS solver across standard regression metrics (MSE, MAE, R²). Visual analysis identified a dataset anomaly—an artificial value cap at 5.0—highlighting the critical necessity of outlier filtering during the data preprocessing phase.
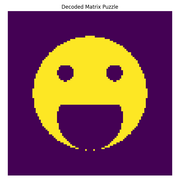
Task 6: The Matrix Puzzle
This exercise focused on applying mathematical numpy operations to decode and visualize a scrambled 1D data array. Guided by programmatic clues, numpy.reshape was utilized to form a square matrix, followed by transpositions (.T) to correct the data's orientation. The debugging process required isolating geometric transformations and testing array reversals ([::-1]) versus circular shifts (numpy.roll) to differentiate between raw 1D data stream manipulation and 2D matrix flipping, ultimately rendering the structurally sound image using matplotlib.
Task 7: Portfolio & Personal Branding Architecture
A fast, responsive personal portfolio was developed utilizing a lightweight stack of Vanilla HTML5, CSS3, and JavaScript, bypassing heavy frameworks to minimize load latency. The UI/UX was structured using CSS Grid and Flexbox for native responsiveness, alongside a dynamic dark/light mode toggle utilizing CSS :root variables and localStorage for state persistence. The content highlights high-level architectural projects, specifically the custom Cloudflare R2 pipeline for MyUVCE Hub and the Next.js geospatial migration for the UVCE Classroom Directory. The codebase is version-controlled via Git and configured for immediate edge-network deployment.
Task 8: Technical Resource Documentation (Headless Servers)
A technical resource article was authored using Markdown to explore the architectural utility of headless servers. The document details how bypassing graphical user interfaces (GUIs) reclaims compute resources, reduces security attack surfaces, and enables automated remote orchestration via tools like SSH and process managers. To bridge theory with practical application, the article outlines a real-world data pipeline where a local headless node handles raw payload ingestion, data compression, and secure egress to cloud storage (e.g., Cloudflare R2). This task demonstrated the ability to structure and format technical documentation effectively while explaining complex cloud infrastructure concepts.
Task 9: Hardware Telemetry & Radar Simulation
A simulated radar telemetry system was developed using Tinkercad to explore hardware-level data acquisition and embedded control loops. The architecture utilizes an Arduino Uno interfacing with an HC-SR04 Ultrasonic Sensor and a Micro Servo to perform synchronous spatial polling. By sweeping the servo across a 150-degree field of view, the system calculates object distance via wave flight time and streams the mapped coordinates to the Serial Monitor. This exercise demonstrated embedded C++ interrupt handling and raw sensor data ingestion.
Task 10: DC Motor Speed Control
A hardware control loop was established to manage the velocity and directional state of a 5V BO motor. Utilizing an Arduino Uno, Pulse Width Modulation (PWM) signals were generated to dictate motor speed. Because microcontrollers cannot safely source high currents, an L298N H-Bridge motor driver was integrated to act as the power amplification and switching layer. Prior to physical deployment, the circuit logic was validated via a Tinkercad simulation, successfully demonstrating the interface between digital command logic and electromechanical execution.
Task 11: Edge Computing & Networked Actuation (ESP32 Web Server)
This task focused on establishing a networked control plane utilizing an ESP32 edge compute node. The ESP32 was configured to host a standalone HTTP web server, exposing a lightweight API route (/toggle). This architecture enables asynchronous, bidirectional communication between a browser-based client and the physical microcontroller over a Local Area Network.
Task 14: Karnaugh Maps and Logic Circuit Derivation
A digital logic circuit for a burglar alarm system was designed and simulated based on specific input conditions (Door and Key states). The logical constraints were first mapped to a truth table, and a 2-variable Karnaugh Map was utilized to derive the simplified Boolean expression: $A = D \cdot \overline{K}$. This mathematical model was then translated into a physical circuit simulation using standard TTL logic components. A 7404 Hex Inverter was deployed to invert the Key signal, and a 7408 Quad AND Gate was used to multiply the logic signals. By applying $10\text{k}\Omega$ pull-down resistors to the input switches to prevent floating signals, the simulation successfully validated the derived Boolean expression, triggering the output strictly during the unauthorized entry state.
Video
Task 15: Technical Community Engagement & Continuous Learning
Active engagement with the broader engineering community was demonstrated through participation in KAGADA 2025, the 21st Annual National-Level Technical Student Conference hosted by IEEE UVCE on November 8, 2025. Attending this event provided valuable exposure to advanced technical presentations, peer-reviewed research, and industry-standard documentation practices. The official certification of participation for the IEEE conference is appended below as formal verification.
.jpg)
Task 17: Introduction to VR and AR
VR is basically a computational illusion of the physical world. It replaces the physical world entirely with a synthetic and interactive 3D digital environment. From a hardware perspective, this is done through stereoscopic rendering, i.e., displaying two slightly offset images to simulate binocular depth perception.
Modern VR relies heavily on sub-20 ms latency to prevent simulator sickness. This requires high-frequency polling from Inertial Measurement Units combined with optical sensors to achieve 6 Degrees of Freedom. This allows the system to track not just where the user is looking but their physical movement within the spatial volume using a technique called SLAM (Simultaneous Localization and Mapping).
The Architectural Differences
While both AR and VR fall under the umbrella of Extended Reality (XR), their rendering methods and hardware architectures are distinct.
- VR: Operates as a closed system. The hardware utilizes opaque displays that block out ambient light. The compute pipeline is entirely dedicated to rendering the synthetic environment and the user's localized position in it.
- AR: Operates as an open system. It superimposes digital assets onto the real world. This is achieved either through transparent waveguides (like Microsoft HoloLens) or high-resolution video passthrough.
The key distinction among these is that AR requires constant real-time semantic understanding of the user's surroundings, whereas VR operates on an already existing digital world.
The XR Technology Stack
Developing this stack requires a specific pipeline, which is very different from 2D web or mobile development.
- Silicon Layer: Most standalone headsets are powered by specialized ARM-based System-on-Chips, primarily the Qualcomm Snapdragon XR series, which has dedicated silicon for processing camera feeds and audio simultaneously.
- Game Engines: This is dominated by Unity and Unreal Engine. These handle physics, collision detection, and light rendering.
- Standardization: There have been multiple codebases for Meta, Valve, HTC, etc., but now the industry has shifted to develop around OpenXR, which is a royalty-free API standard that unifies hardware communication.
- WebXR: For web-native deployments, the WebXR device API allows spatial experiences to run in modern browsers without app installations. It heavily utilizes JavaScript libraries like Three.js and Babylon.js.
Current Industry Trends
- Mixed Reality: The line between VR and AR is disappearing. Devices like Meta Quest 3 and Apple Vision Pro use VR hardware but utilize external cameras to feed the real world inside with near-zero latency, allowing for MR experiences.
- Foveated Rendering: This uses internal eye-tracking cameras which help determine where the user is looking and renders only that tiny focal point in maximum resolution, which reduces GPU compute load for the rest of the peripheral view.
The Indian XR Ecosystem
- Trezi: A SaaS platform which is disrupting the Architecture, Engineering, and Construction industry. They allow architects and clients to upload CAD models and perform 1:1 scale virtual walkthroughs of buildings before physical construction begins.
- AjnaLens: This Mumbai-based hardware and software manufacturer has developed their own MR headsets and is heavily integrated into enterprise training and the Indian defense sector.
- Tesseract: Acquired by Reliance Jio, this hardware startup is running the JioGlass initiative focusing on consumer-grade AR glasses and developing the Jio mixed reality ecosystem.
Task 19: Express.js Resource Library Architecture
A Proof of Concept (PoC) web application was developed utilizing the Express.js framework within a Node.js environment. To satisfy the requirements for a resource library and account management system without the overhead of deploying a persistent database cluster, an in-memory data architecture was utilized. The Express server acts as both a static file server for the HTML/JS frontend and a RESTful API.