
COURSEWORK
B's IOT-001 course work. Lv 2
| B Guruprasada | AUTHOR | ACTIVE |
Guru's Level 1 report
2 / 1 / 2025
Task 1:3D Printing
- 3D printing, also known as additive manufacturing, is a process of creating three-dimensional objects from a digital file.
- The creation of a 3D printed object is achieved using additive processes.
- In an additive process, an object is created by laying down successive layers of material until the object is created
- I have learned about 3 D printing process and understood about STL file and how to slice it using platform like Ultimaker Cura. Finally generated G-code and placed it to printing using Ender printer.
3D Printing Key Features
- Common Printer Types:
- Ender
- Creality
- Printing Process:
- STL File: 3D model data in a standard file format.
- G-code: Instructions for the 3D printer to move and extrude filament.
Key Printing Settings
- Material: PLA (Poly-Lactic Acid) - a common, easy-to-use thermoplastic.
- Bed Temperature:
- Recommended range: 50°C - 60°C.
- May be printed without a heated bed.
- Nozzle Temperature:
- Recommended range: 180°C - 220°C.
- Controls the melting of filament for extrusion.
- Infill Density:
- Infill density in 3D printing refers to the amount of material printed inside the object, which directly affects its strength, weight, and print time.
- It is typically expressed as a percentage, ranging from 0% (completely hollow) to 100% (fully solid).


Task 2:API
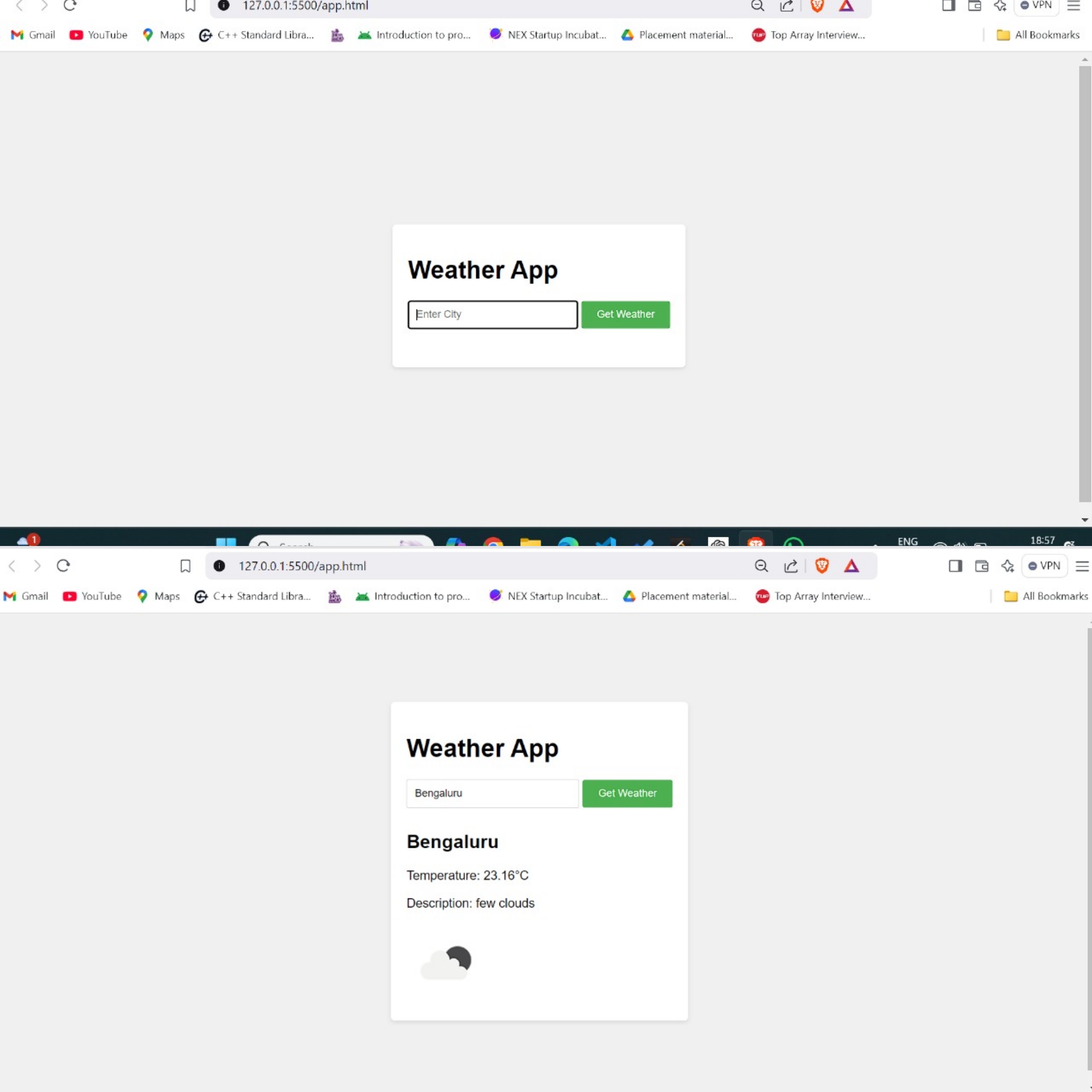
- I have followed procedure to create Application programming interface web app using languages like HTML,CSS, JAVASCRIPT and I implemented it in code editor by fetching weather information from API key.
Task 3: Getting familiarised with the command line on Ubuntu
- I have been understood basic command lines of Ubantu OS and also learnt other command lines for windows like Command prompt.
Ubuntu Commands and Learnings
Ubuntu is a popular open-source operating system based on the Linux kernel This below keys outline some basic commands learned in Ubuntu:
1. Creating a Folder:
- Command:
mkdir test - Explanation: Creates a new folder named
testin your current directory. - Syntax:
mkdir foldername
2. Changing Directory:
- Command:
cd test - Explanation: Navigates into the folder named
test. - Syntax:
cd foldername
3. Creating a Blank File:
- Command:
touch blank.txt - Explanation: Creates a new empty file named
blank.txt. - Syntax:
touch filename.extension
4. Listing Files:
- Command:
ls - Explanation: Displays a list of all files and folders in the current directory.
- Syntax:
ls
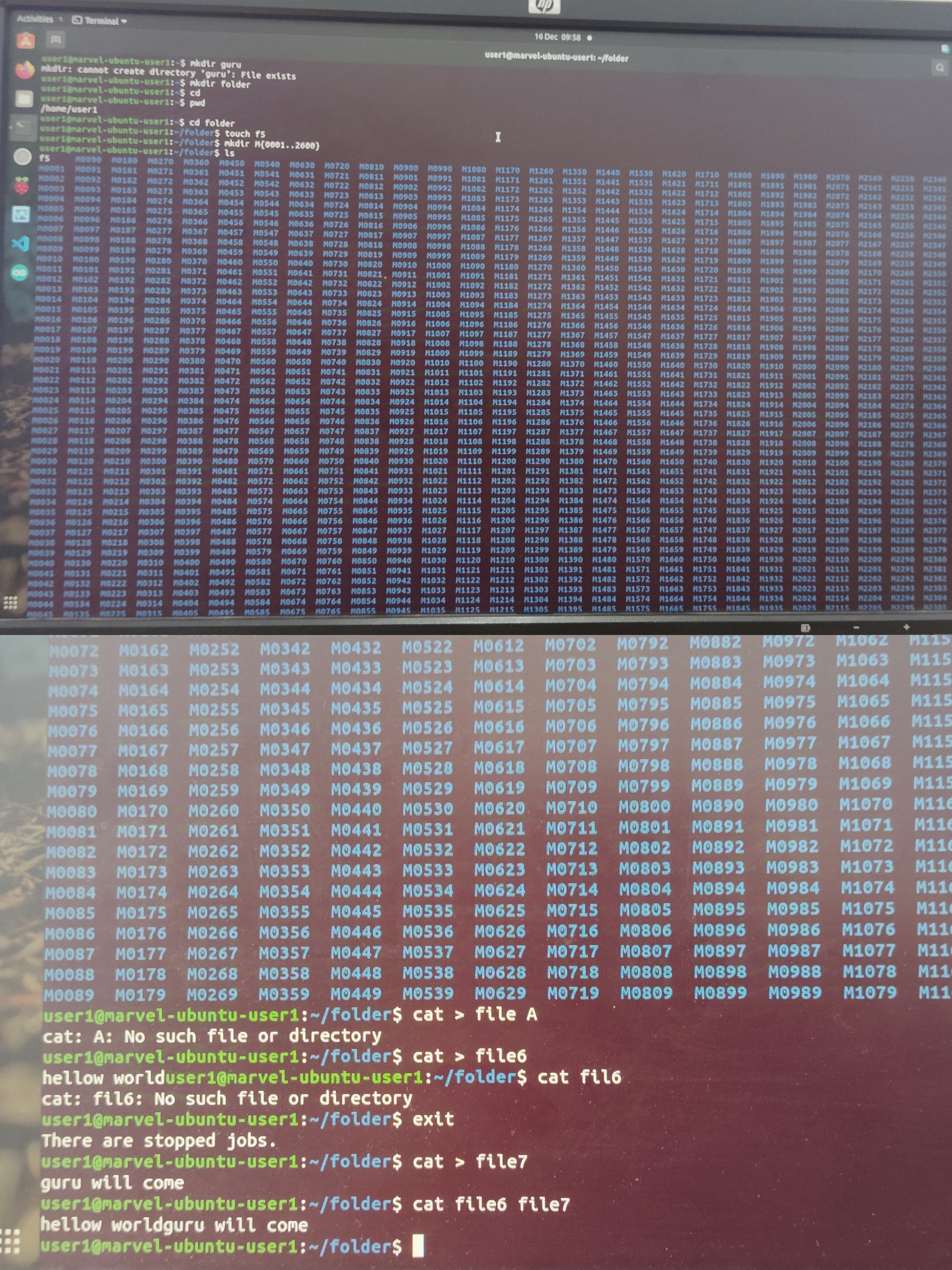
5. Creating Multiple Folders Sequentially:
- Command:
mkdir M{0001..2600} - Explanation: Creates 2600 folders named
M0001,M0002, ...,M2600within the current directory. - Syntax:
mkdir initial_of_filename{first_value..end_value}(replaceinitial_of_filenamewith the desired prefix)
6. Concatenating Text Files:
- Example:
- Create two files:
blank.txtandblank2.txt. - Write "123" in
blank.txtand "456" inblank2.txt.
- Create two files:
- Command:
cat blank.txt blank2.txt > combined.txt - Explanation: Combines the contents of
blank.txtandblank2.txtinto a new file namedcombined.txt. The>operator redirects the output to the specified file. - Syntax:
cat file1.ext file2.ext > output_file.ext(replaceoutput_file.extwith the desired name for the combined file)
Additional Notes:
- These commands are case-sensitive.
- For more information and advanced usage of these commands, refer to the Ubuntu documentation.
Task 4: Writing Resource Article using Markdown
- A markup language is a system for annotating a document in a way that is syntactically distinguishable from the text.
- It uses tags to define elements within the document, which can then be interpreted by software to format or structure the content.
- Markdown: is a lightweight markup language with plain text formatting syntax.
- It is designed to be easy to read and write, and it can be converted into HTML or other formats.
- Application: Markdown is commonly used for formatting readme files, writing messages in online discussion forums, and creating rich text using a plain text editor
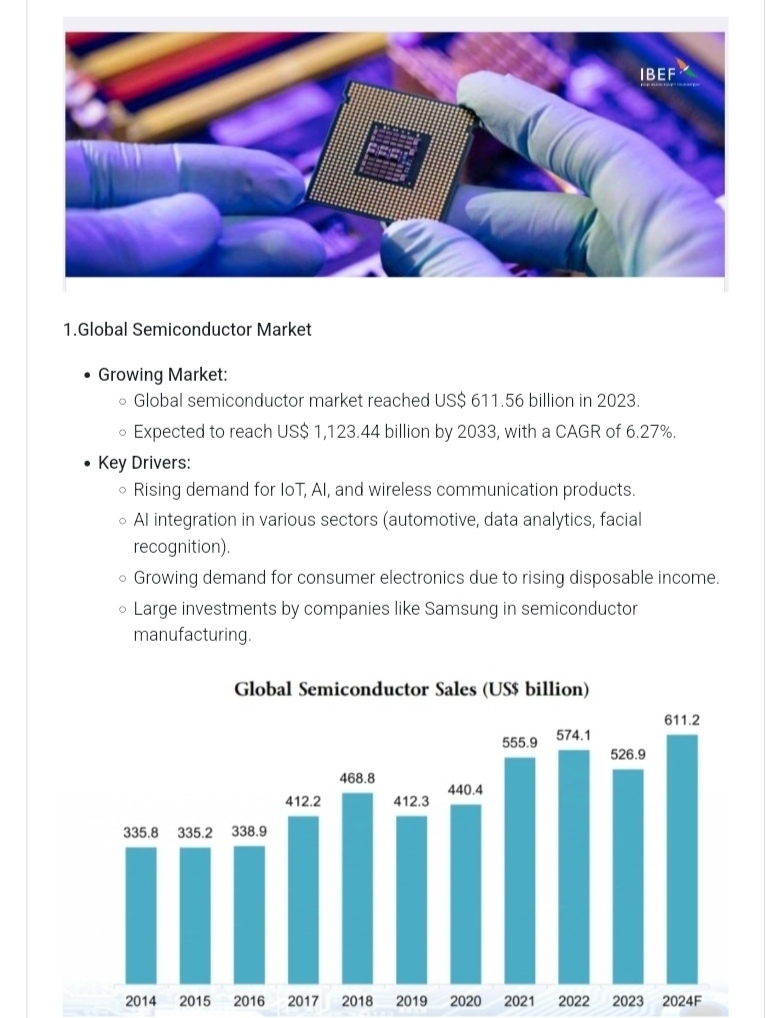
- Using markdown I wrote an article regarding semiconductor field that reflect the present scenario of INDIA, through GitHub.
- In this task I have been followed some basic markdown syntax and learnt to use the syntax and also got familiar to the GitHub .
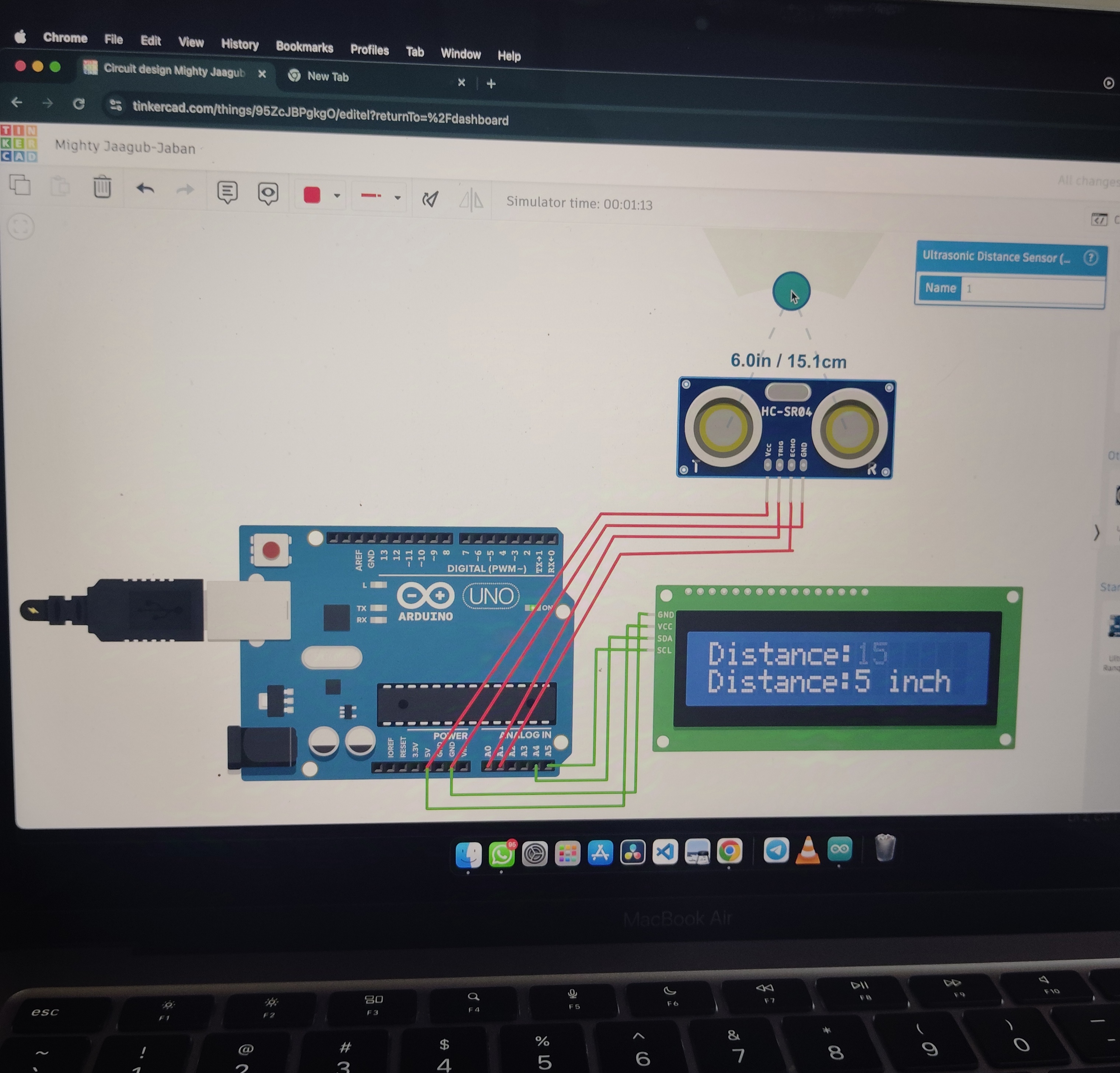
Task 5:Tinkercad
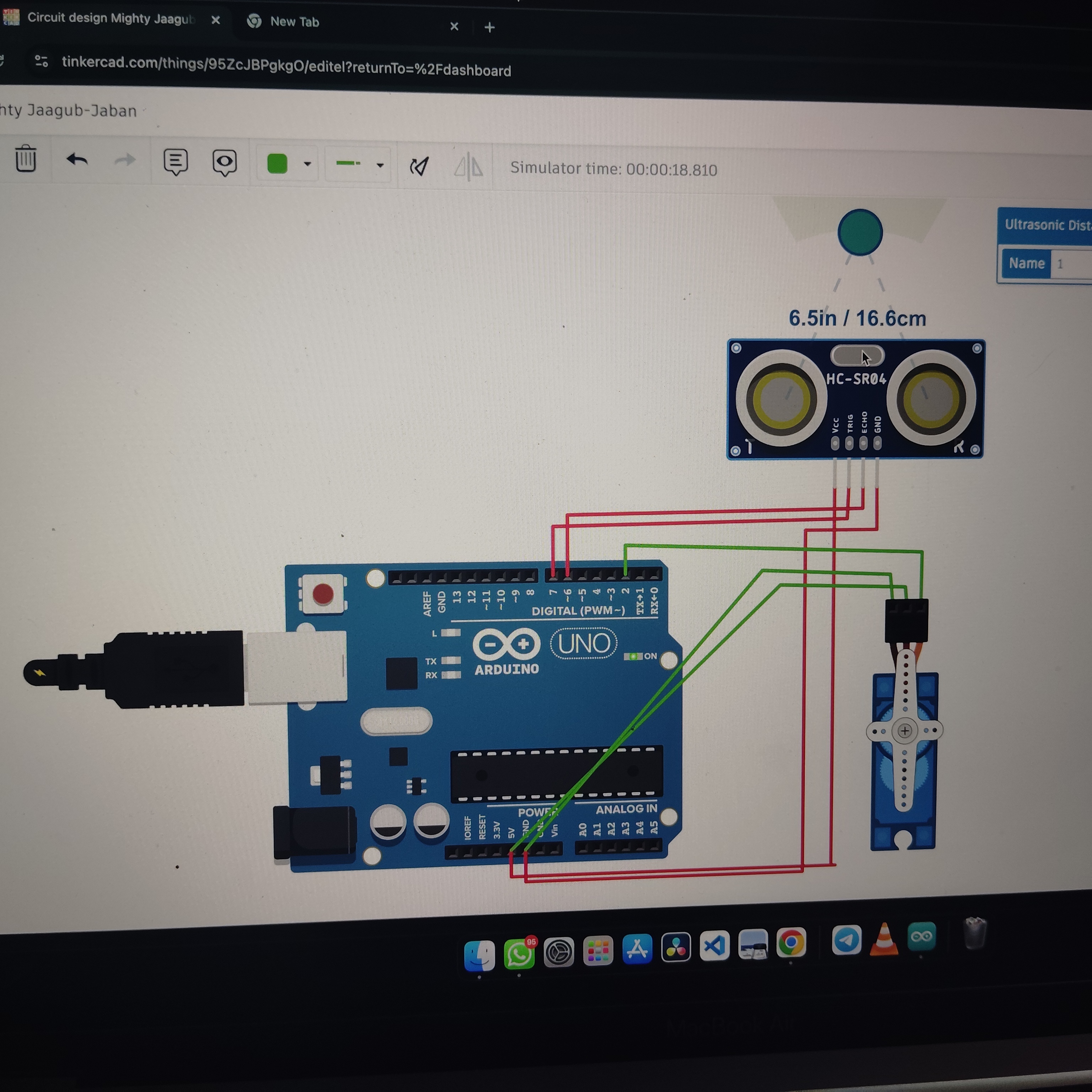
- Created a tinkercad account, got familiar with the application, understood the example circuits given and simulated a simple circuit using an ultrasonic sensor to estimate the distance between an obstacle and the sensor and displayed the results on the serial monitor.
- Also Created a radar system utilising an ultrasonic sensor and servo
motor to detect objects within a certain range. The ultrasonic
sensor emits sound waves and measures the time taken for them
to bounce back, while the servo motor rotates the sensor to cover.
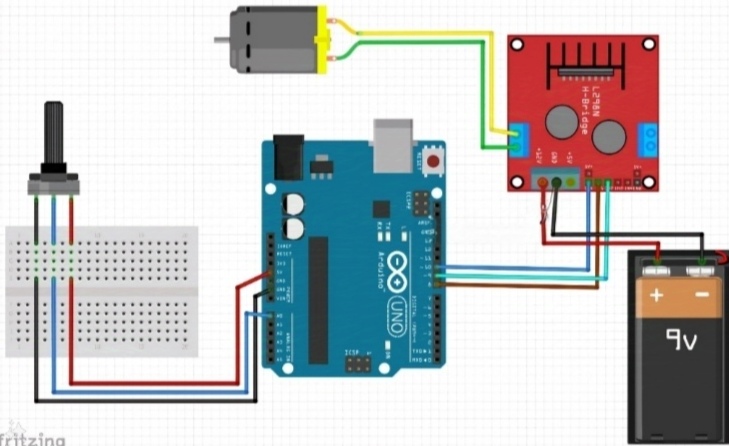
Task 6 : Speed Control of DC Motor
- Explored basic techniques for controlling DC motors, understood the control DC motors using the L298N motor driver and the Arduino board. Using an UNO and H-Bridge L298N motor driver, controlled the speed of a 5V BO motor, tried simulating this on tinkercad and then performed it on the hardware. *Initially I have trouble sooted some problems with code execution and after few hours I got the specific code and run the code to operate dc motor.
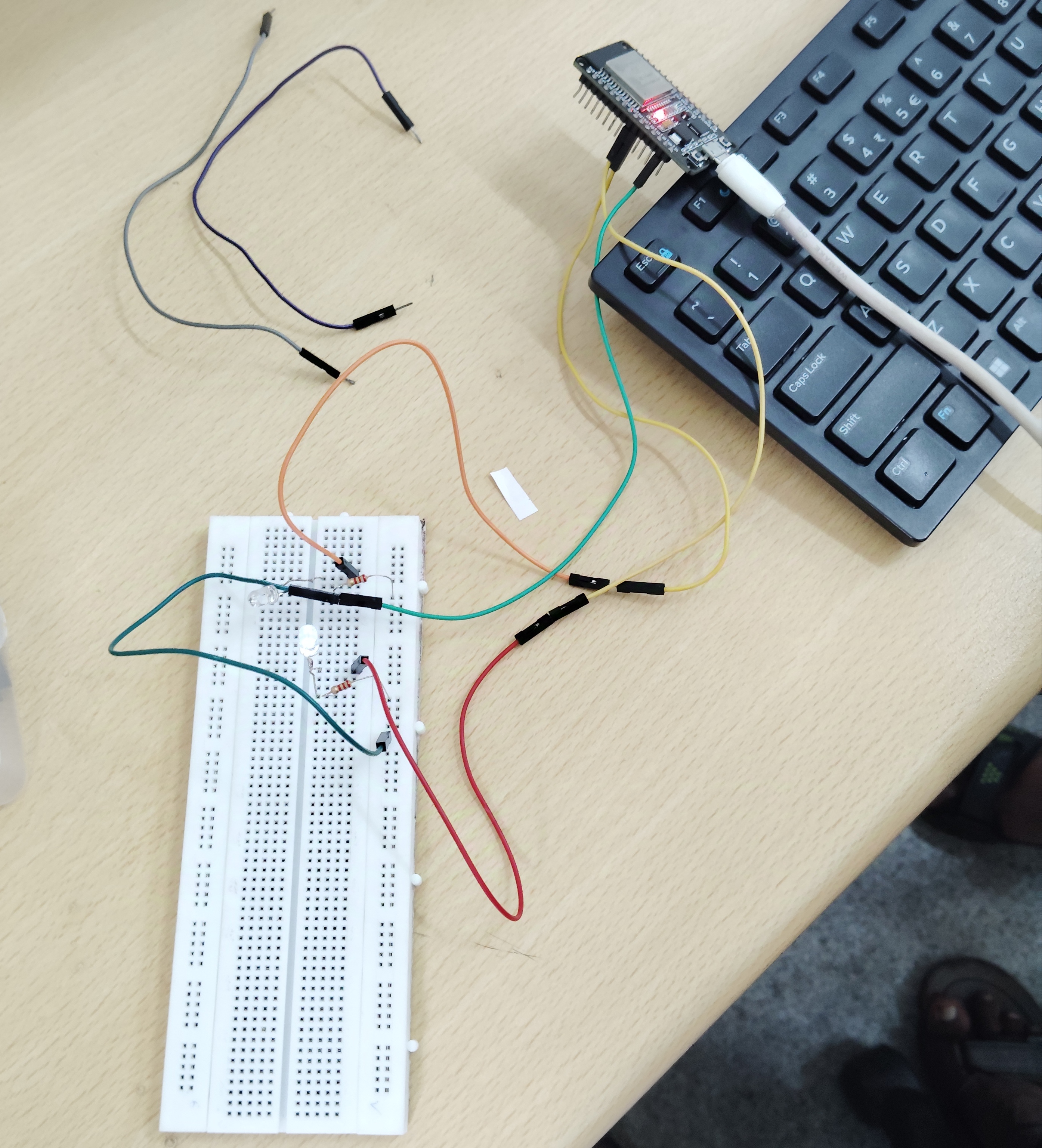
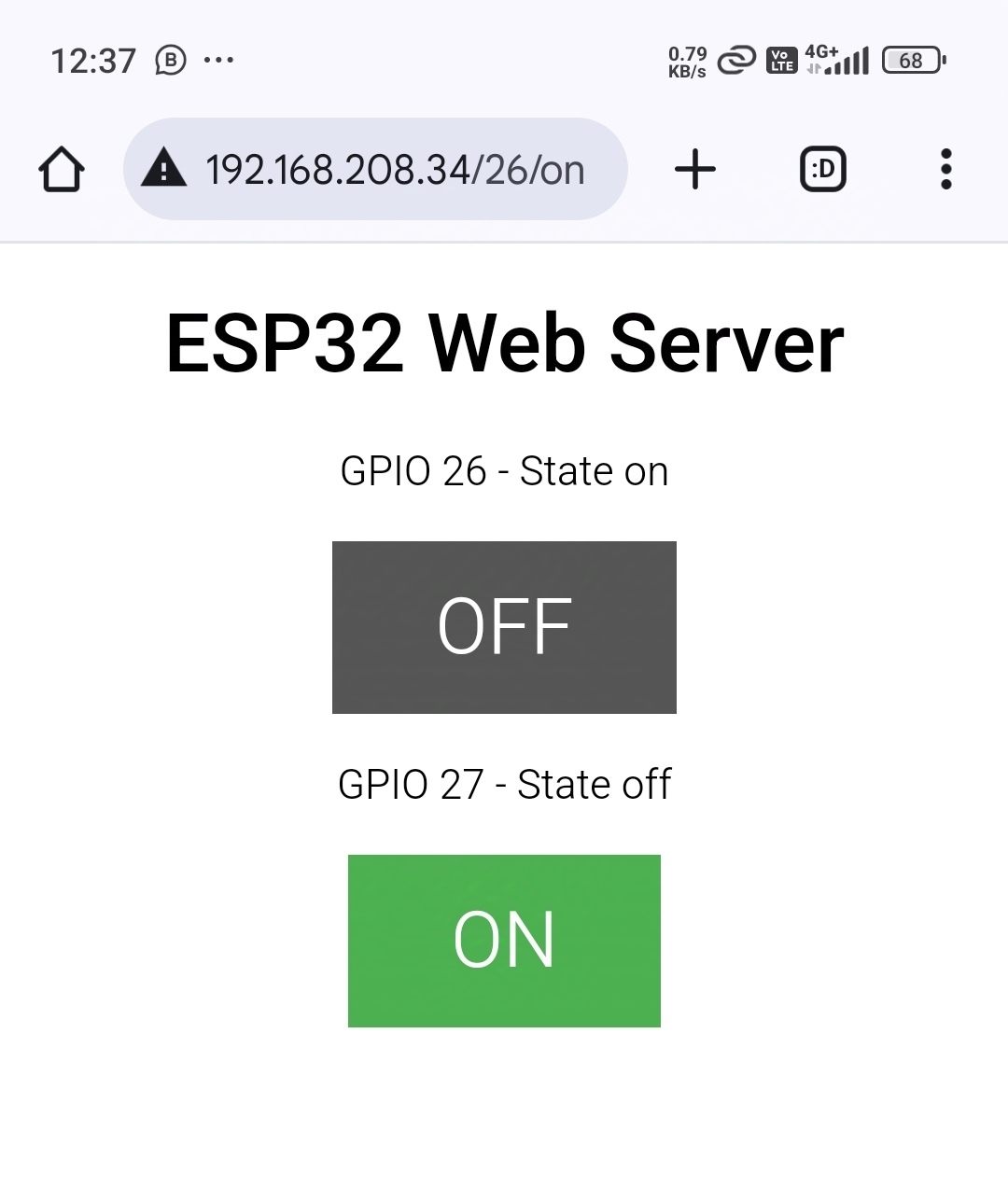
Task 7:LED Toggle Using ESP32
- Learnt the working of an ESP32 and created a standalone web with an ESP32 that controls the LED connected with ESP32 GPIOs. Used the arduino IDE to code and uploaded the program to the ESP32.
- Along with this I have worked on same task with ESP-IDF Platform.
Task 8: Soldering Prerequisites.
- Learnt about the soldering equipments, the solder, the soldering iron, soldering wick, flux, etc. Also got to use them and performed basic soldering on a perf board.
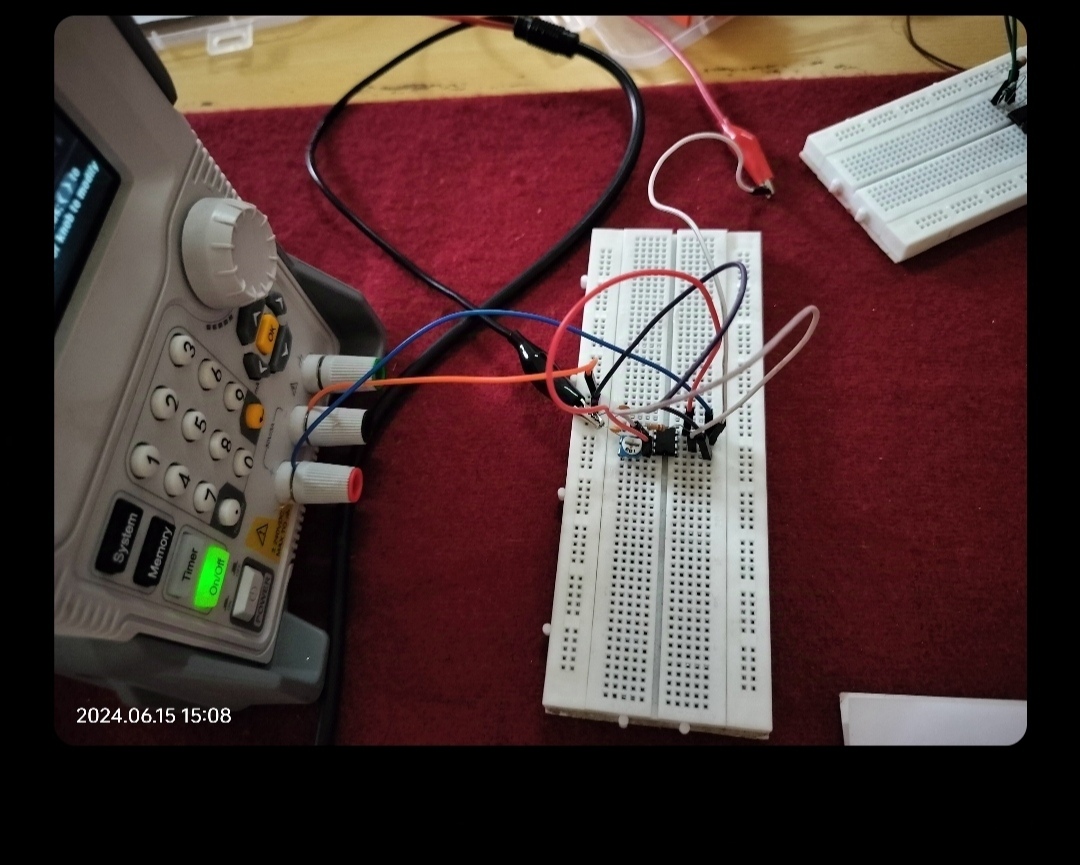
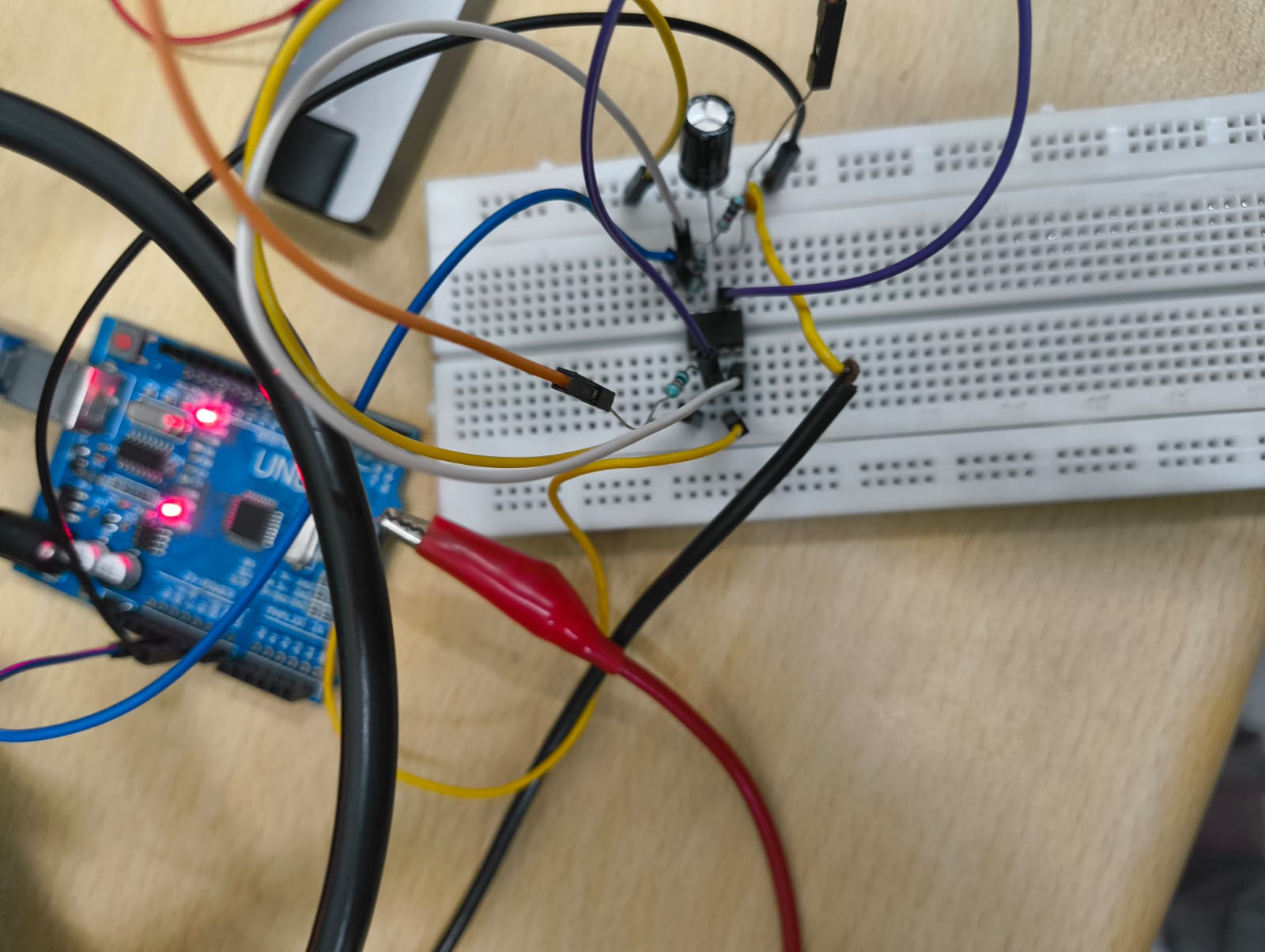
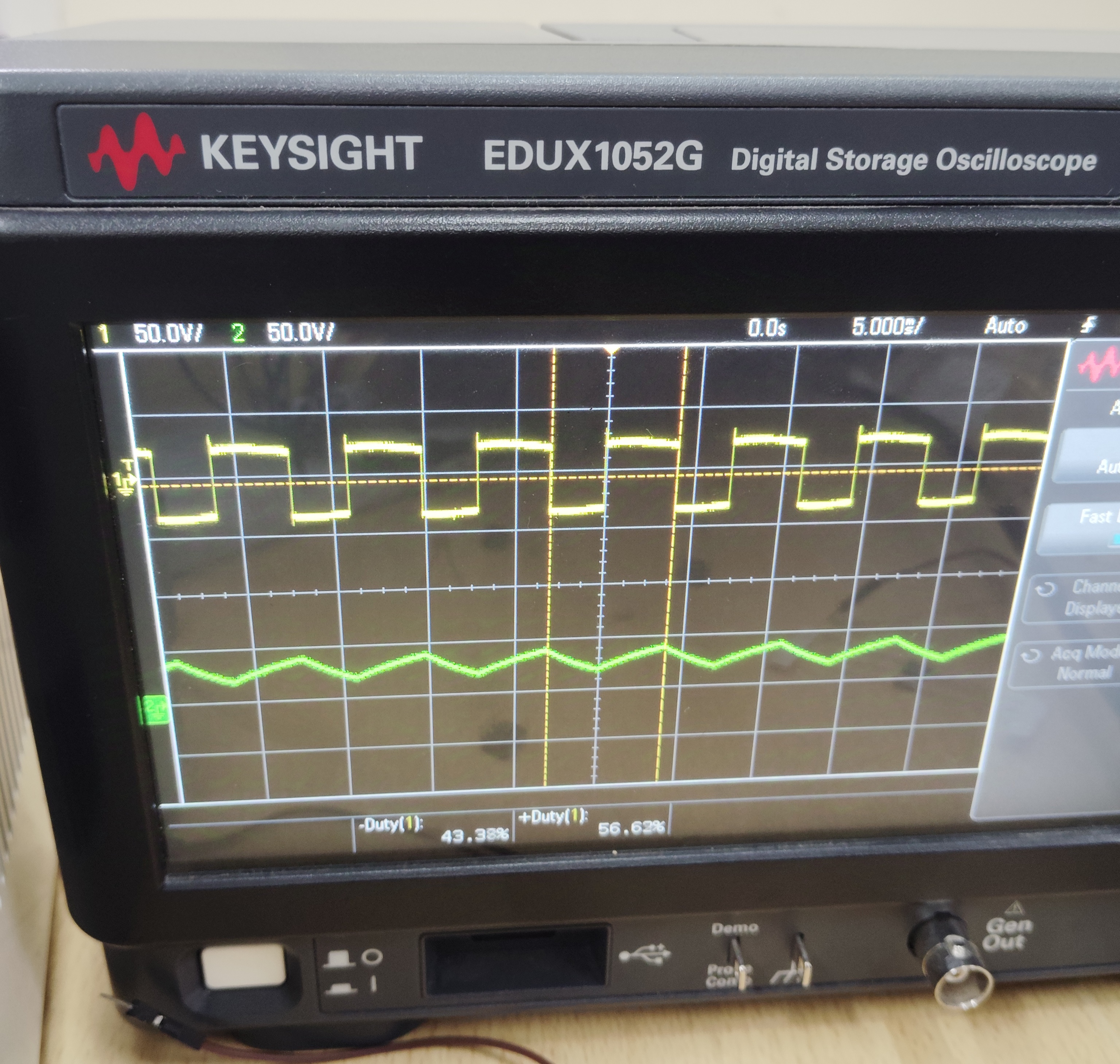
Task 9 : Designing a 555 astable multivibrator
- I have Designed a 555 astable multivibrator with duty cycle 60% and rig up the circuit on a breadboard, by using the probes also observed the output of circuit on the DSO.
- I have been tried different ways to configure the circuit and get the output waveforms.
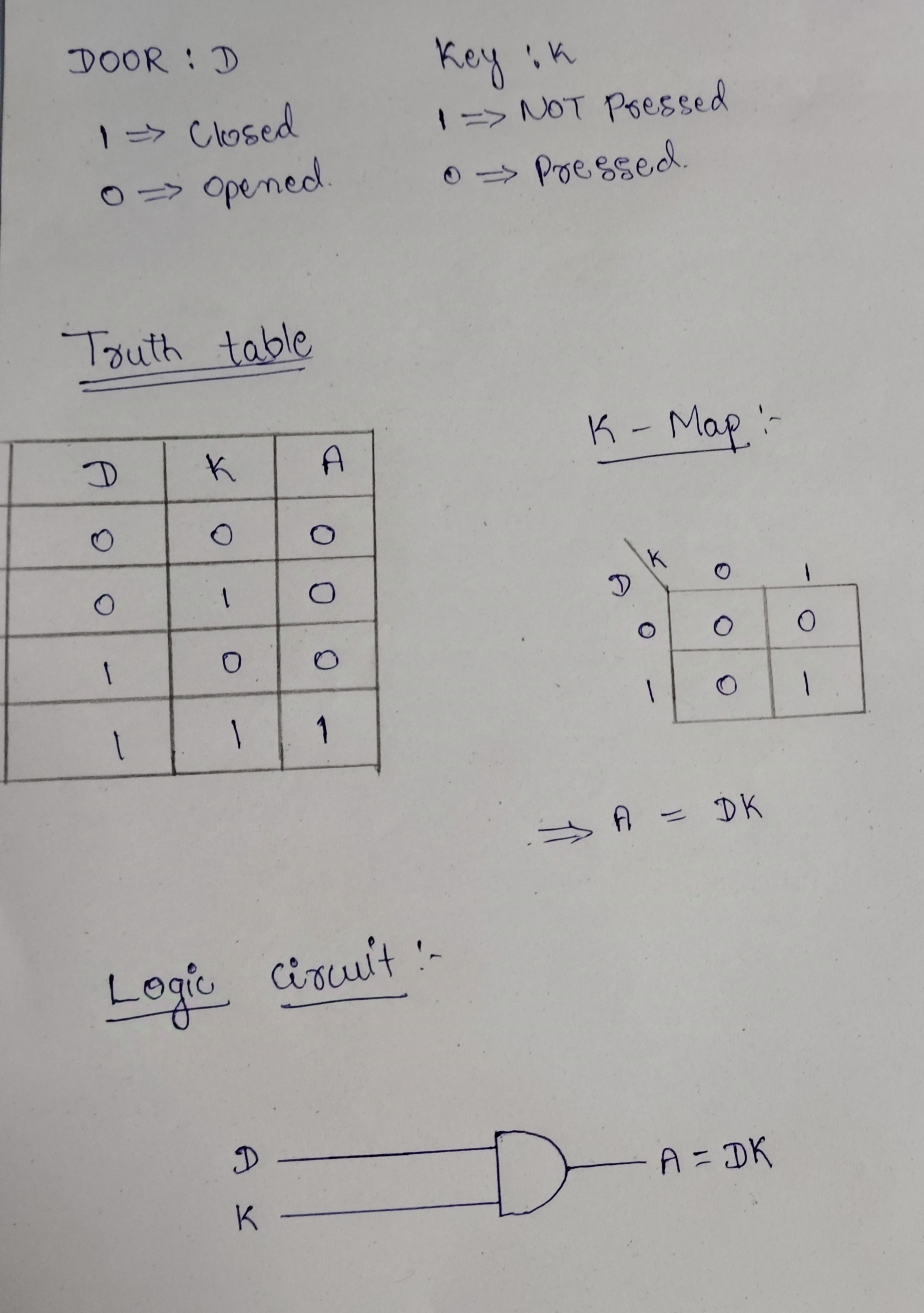
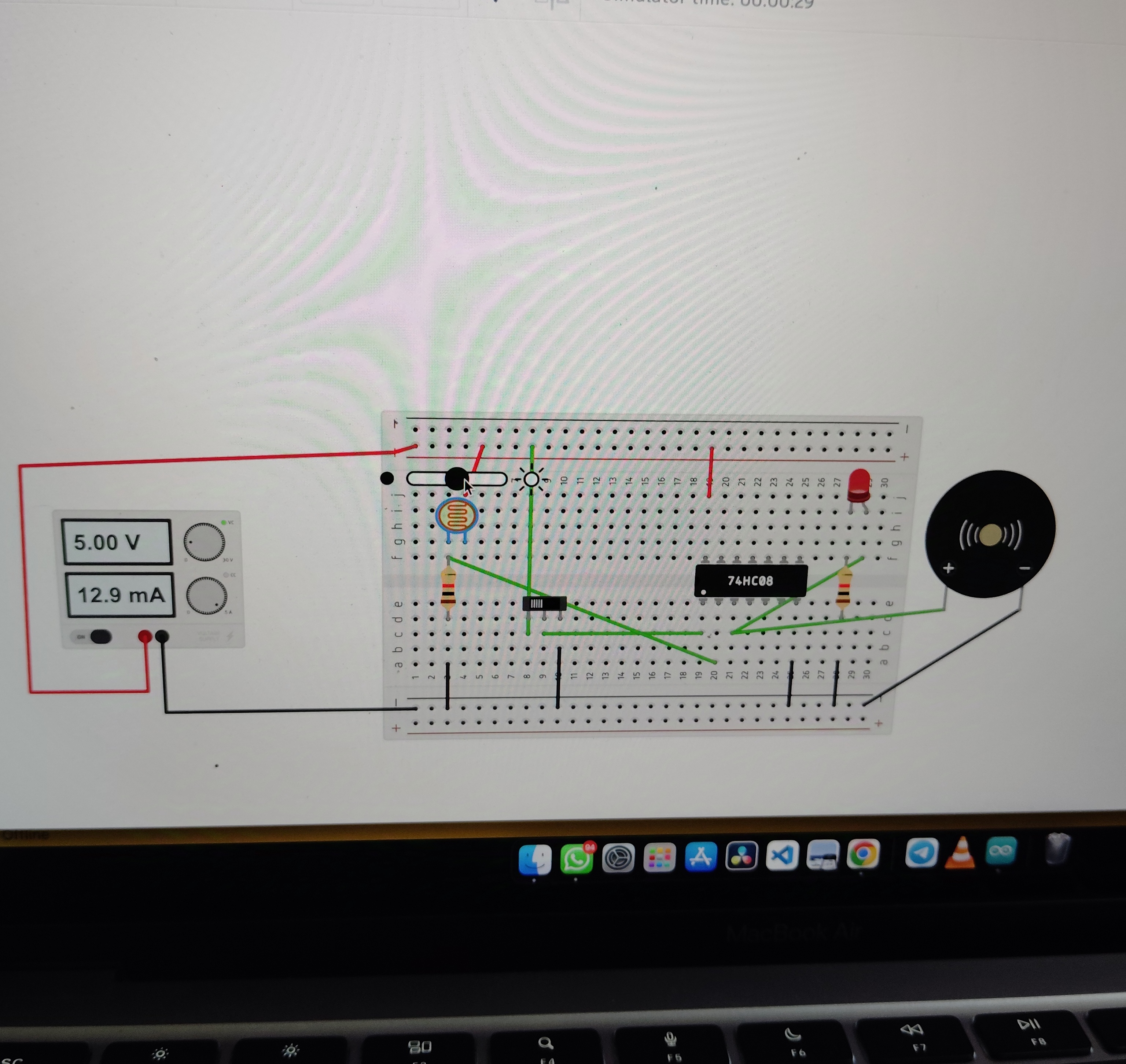
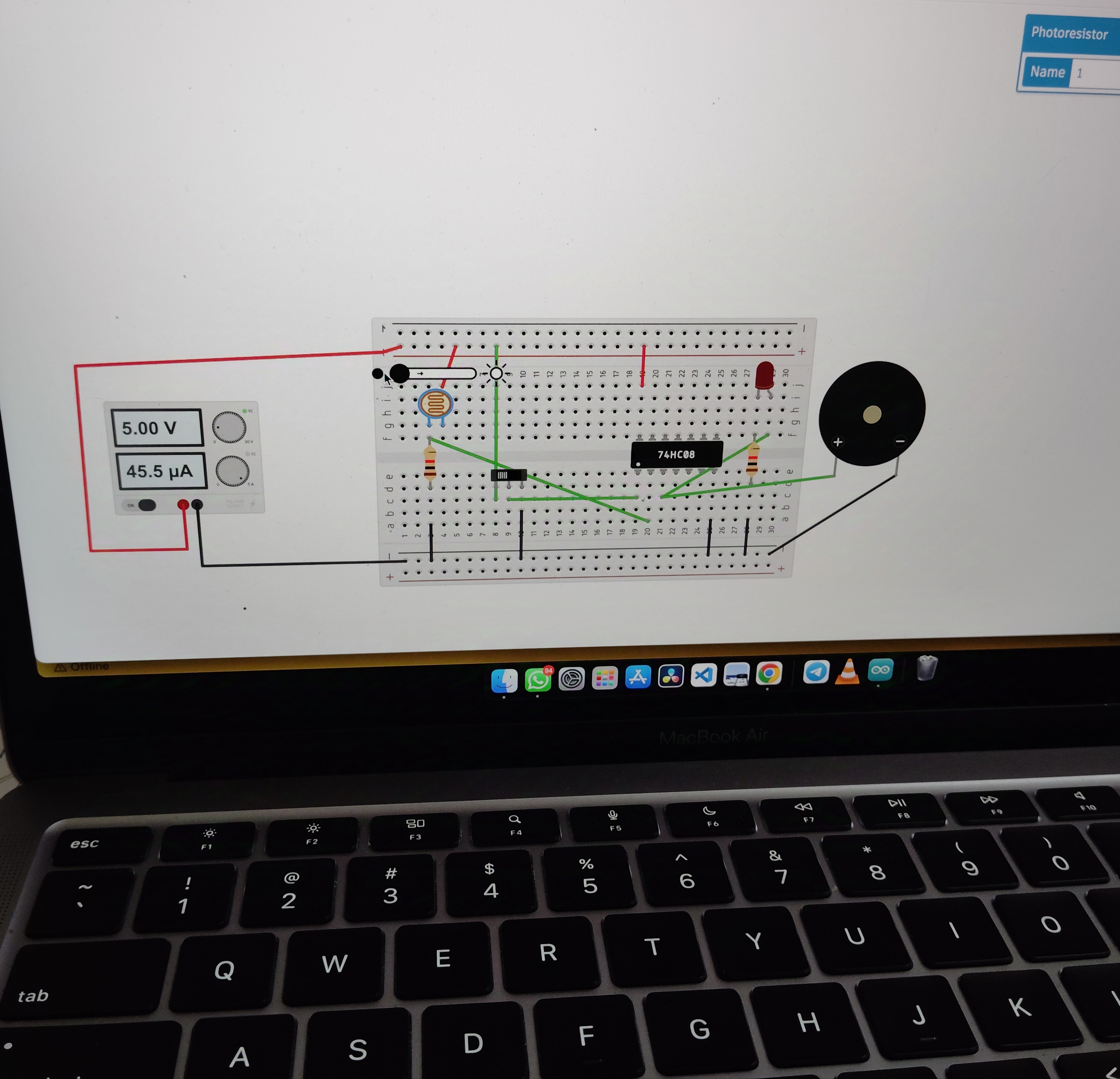
Task 10:Karnaugh Maps and Deriving the logic circuit
- For 4 cases, based on door close/open and key pressed/not pressed, determined the karnaugh map and made a burglar alarm using simple logic circuit of AND gate. The buzzer or led blinks when door is closed and key is not pressed, the situation suggest the house Or Godown that is secured under this condition.
Task 11:Active Participation and Learning
- I have been participated in Automation 2.0,a two day hands on iot workshop organized by BMSCE IEEE PES and Sensor Concil.
The key take aways are as follows:
❖ Internet of Things- Basics, Architecture and Applications ❖ Introduction to Microcontroller and ESP ❖ ESP-IDF Platform ❖ Installation of ESP-IDF ❖ Understanding ESP-IDF Components ❖ Hands-on session on ESP-IDF ❖ Introduction on Smart Parking System ❖ Introduction on IoT Cloud
- I have actively participated as a volunteer for MARVEL Open day 2024 also enjoyed with peers. Also learnt how to make projects with specific ideas.

Task 12 : Datasheets report writing
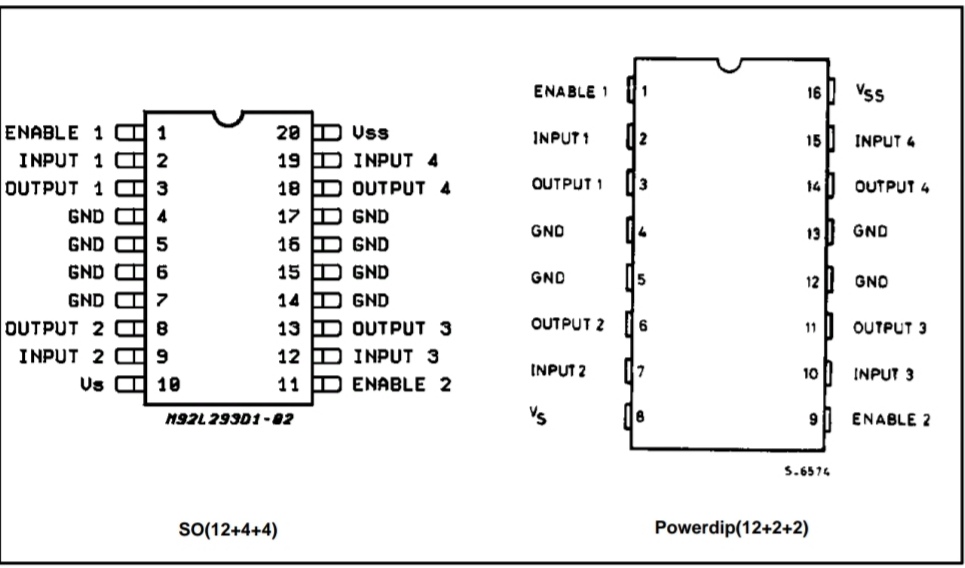
- Topics: L293D motor driver
The Device is a monolithic integrated high voltage, high current four channel driver designed to accept standard DTL or TTL logic levels and drive inductive loads (such as relays solenoides, DC and stepping motors) and switching power transistors.
To simplify use as two bridges each pair of channels is equipped with an enable input. A separate supply input is provided for the logic, allowing operation at a lower voltage and internal clamp diodes are included.
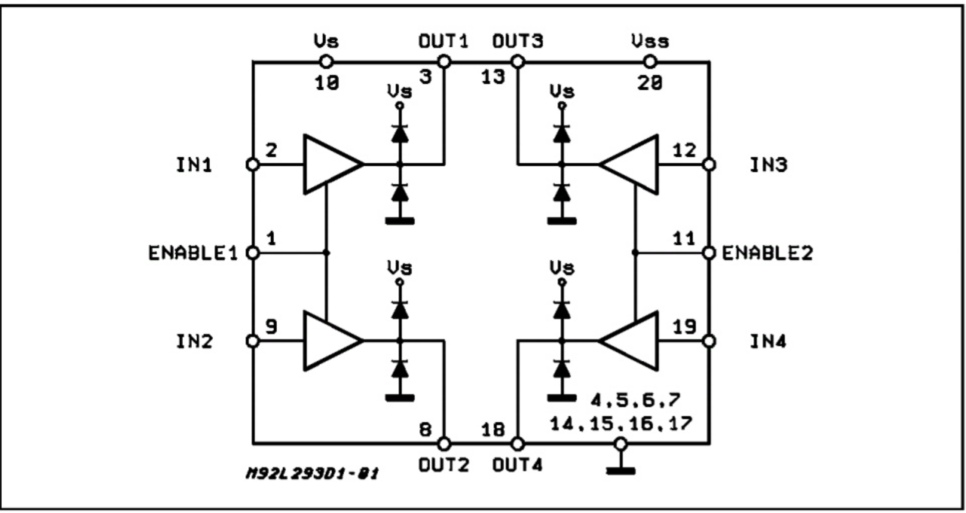
 Internal Structure The L293D is composed of several internal components:
Internal Structure The L293D is composed of several internal components:
- Darlington Transistor Pairs: Each output channel utilizes a Darlington pair of to provide high current gain and drive the motor.
- Input Buffers: These buffers isolate the input signals from the internal circuitry and provide high noise immunity.
- Enable Inputs: These inputs allow for individual control of each pair of output channels.
- Output Clamp Diodes: These diodes are connected across the output transistors to suppress inductive spikes.
H-Bridge Configuration
The L293D can be configured in an H-bridge configuration to control the direction of a DC motor. By appropriately switching the transistors in the H-bridge, the motor can be driven in either direction.
PWM Control
Pulse Width Modulation (PWM) can be used to control the speed and direction of the motor. By varying the duty cycle of the PWM signal, the average voltage applied to the motor can be adjusted, thereby controlling its speed.