
COURSEWORK
Khlongpaiha's EV-RE-001 course work. Lv 3
| Khlongpaiha Reang | AUTHOR | ACTIVE |
2 / 1 / 2025
TASK 1: 3D PRINTING
To understand about the basics and parts of a 3d print. I referred to the resource links given in the coursework section.
I used Thingiverse website to download the model's STL file.I used the creatility software to slice change the infill density and dimensions.
To perform this task i used for 3d printing was Ender 3 printer.
Here is my 3d print. I printed Bay Max a character from Big Hero 6.
 )
)

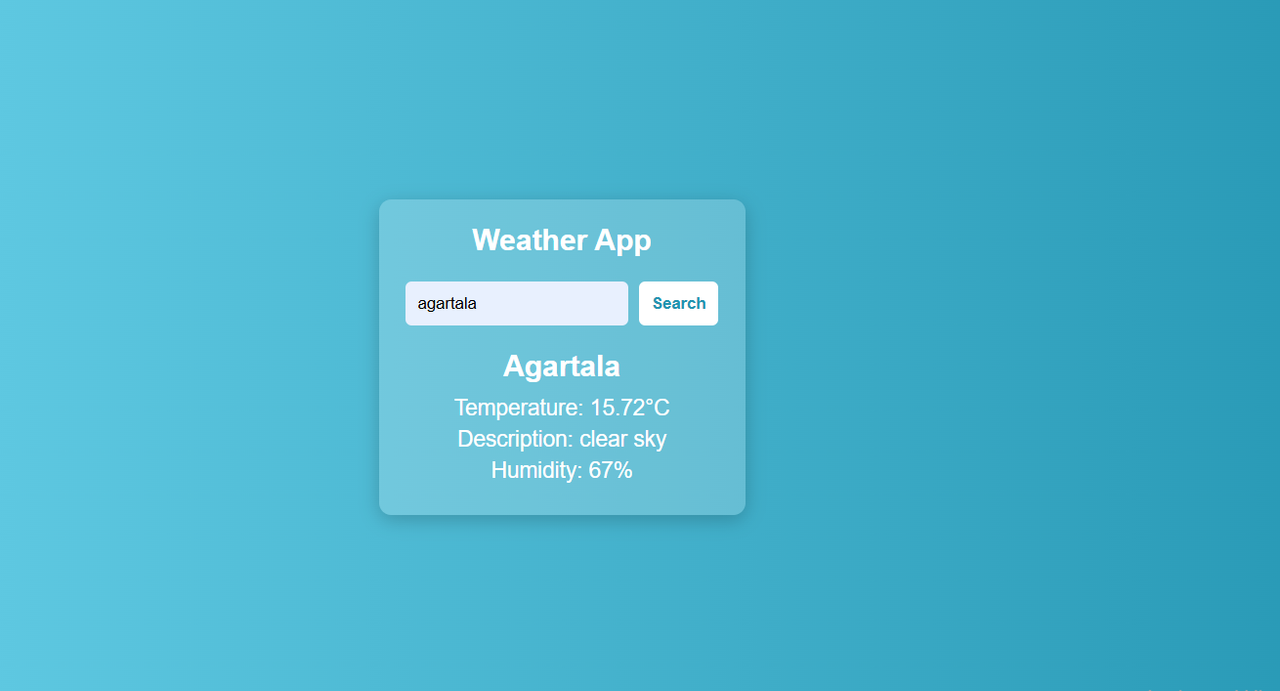
TASK 2: API
In this task I learned about API(Application programming interface).I made a weather app that shows the temperature, humidity of a city with the help of an API key that i got from open weather map.
TASK 3: GITHUB :
From performing this task, I learnt how to create repositories and make changes in other's repositories.In the given task first I identified the error and then I forked the given repository and corrected the error and issued a pull request.

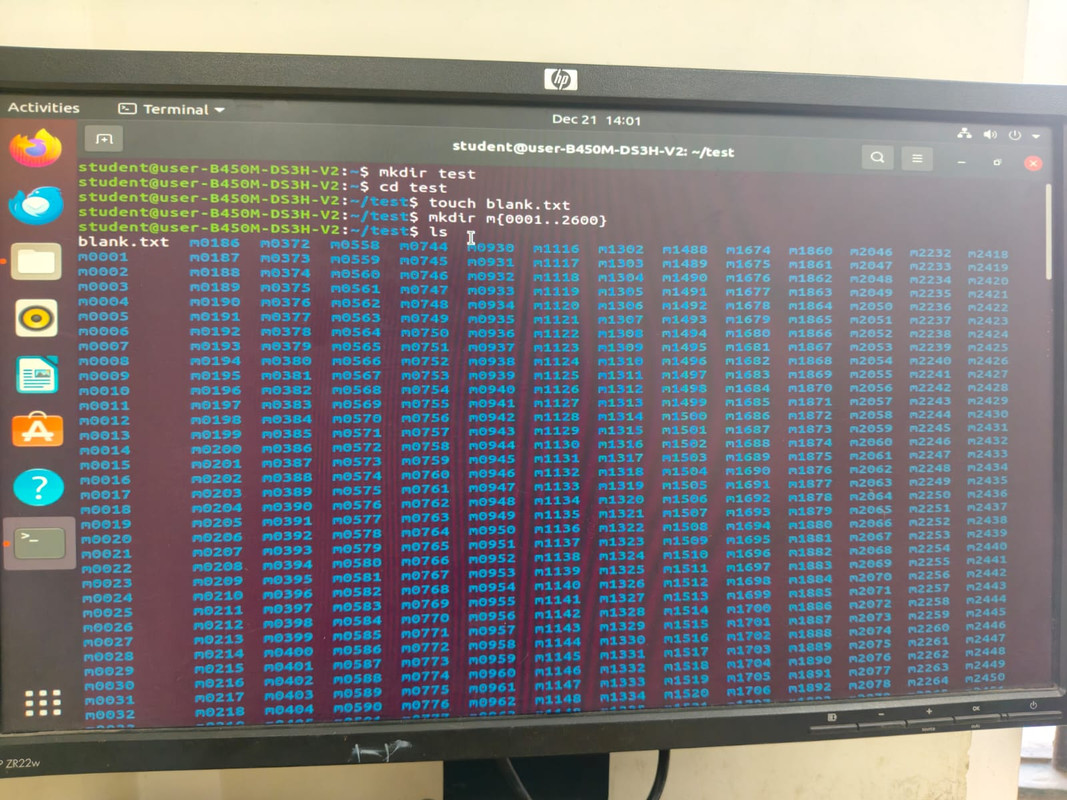
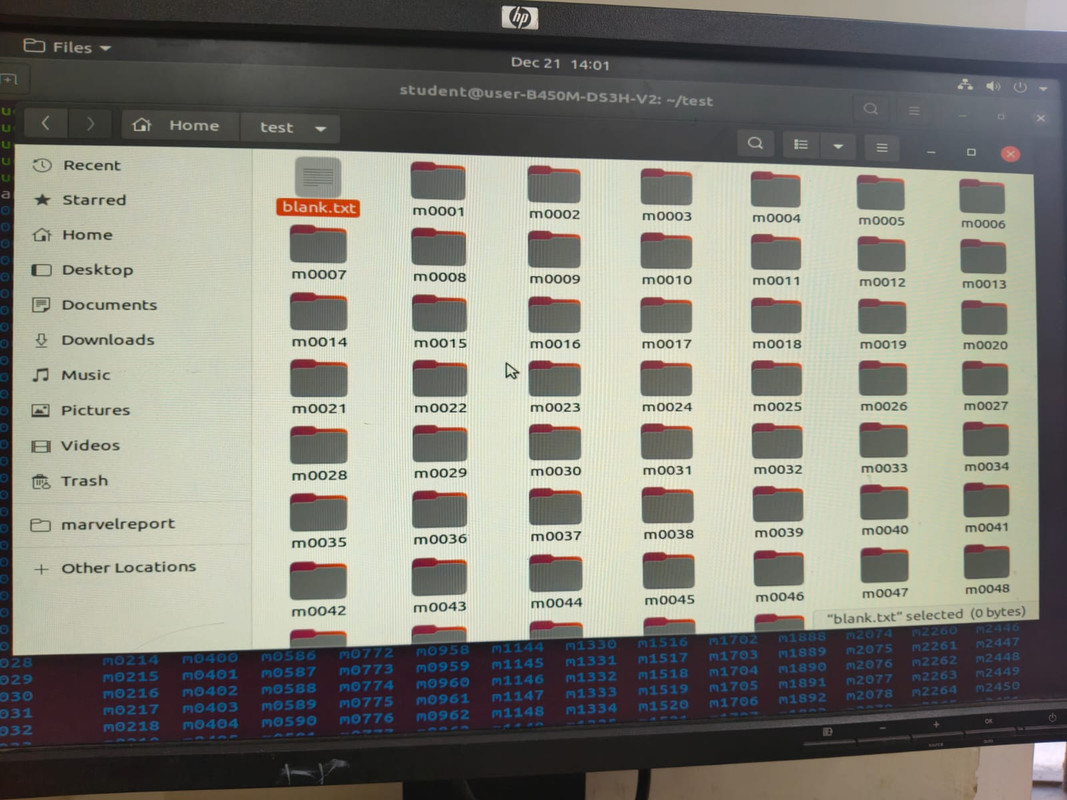
TASK 4: GETTING FAMILAR WITH COMMAND LINE ON UBUNTU:
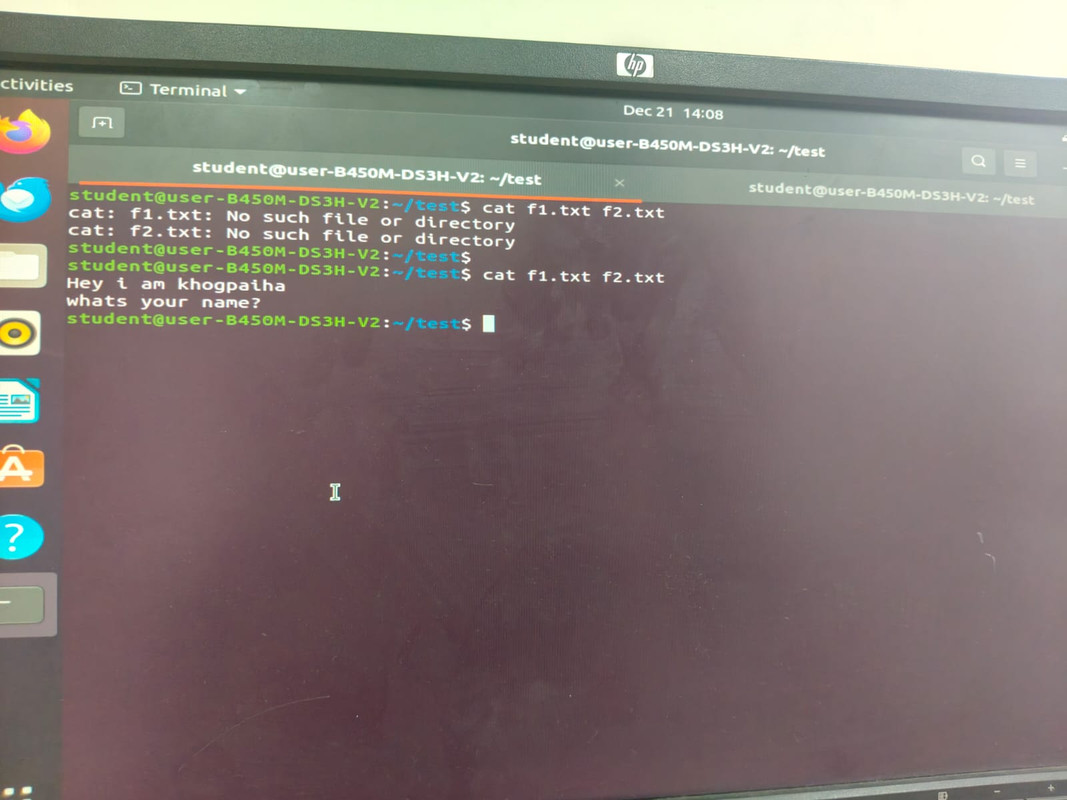
I learned how to use the command line on Ubuntu. I created a folder named "test," added a blank file to it, listed the file, created 2,600 subfolders within it, concatenated two text files with random content, and displayed the results..
Commands used
- Mkdir (make directory)
- cd (change directory)
- touch (to create an empty file)
- ls (list files)
- cd (concatenate)
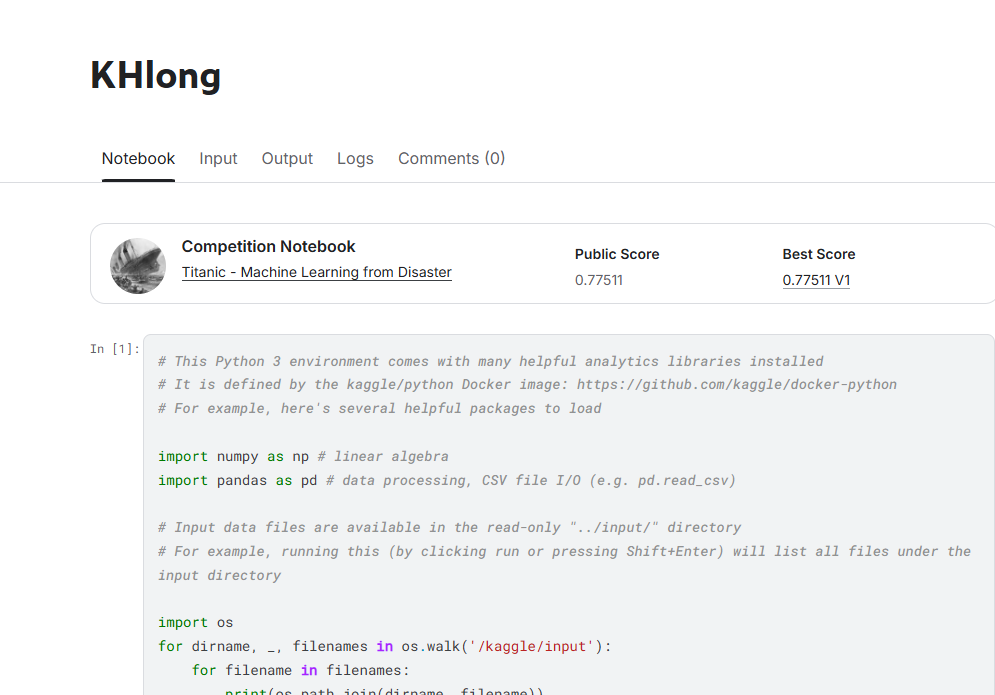
TASK 5: Kaggle contest:
- First i made a kaggle account and familiarized myself with kaggle. The challenge is to predict which passengers survived the Titanic shipwreck.*\
- My public score is 0.76555.*
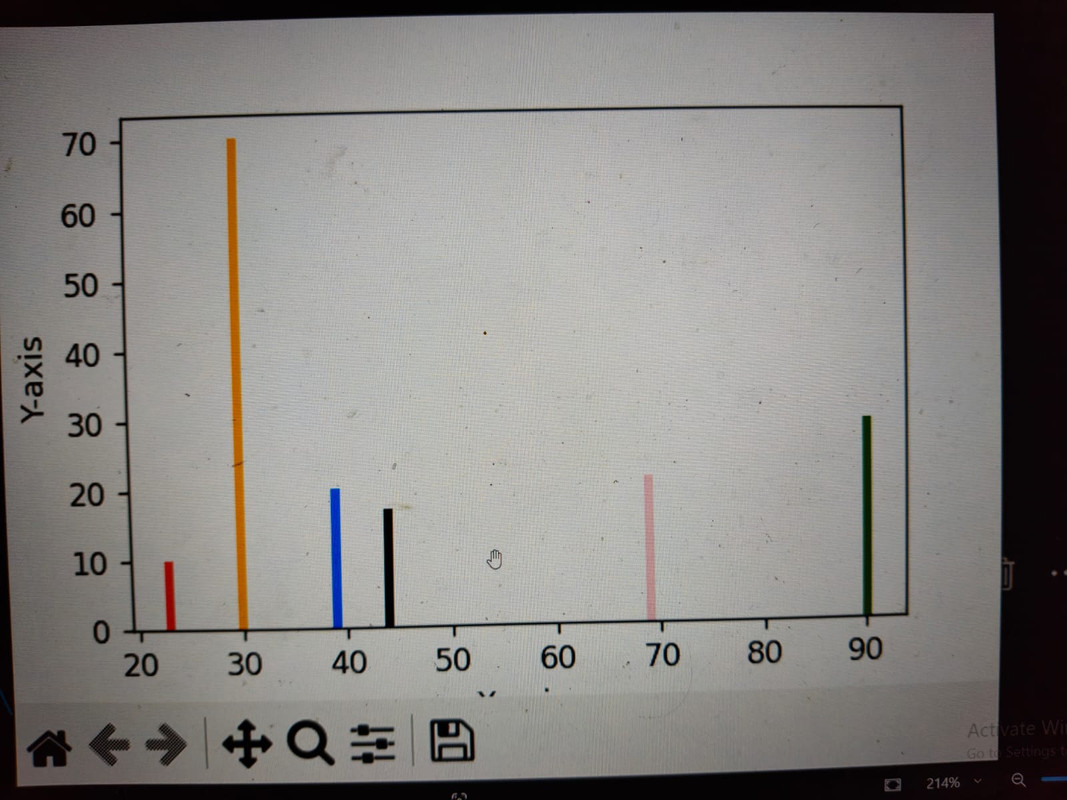
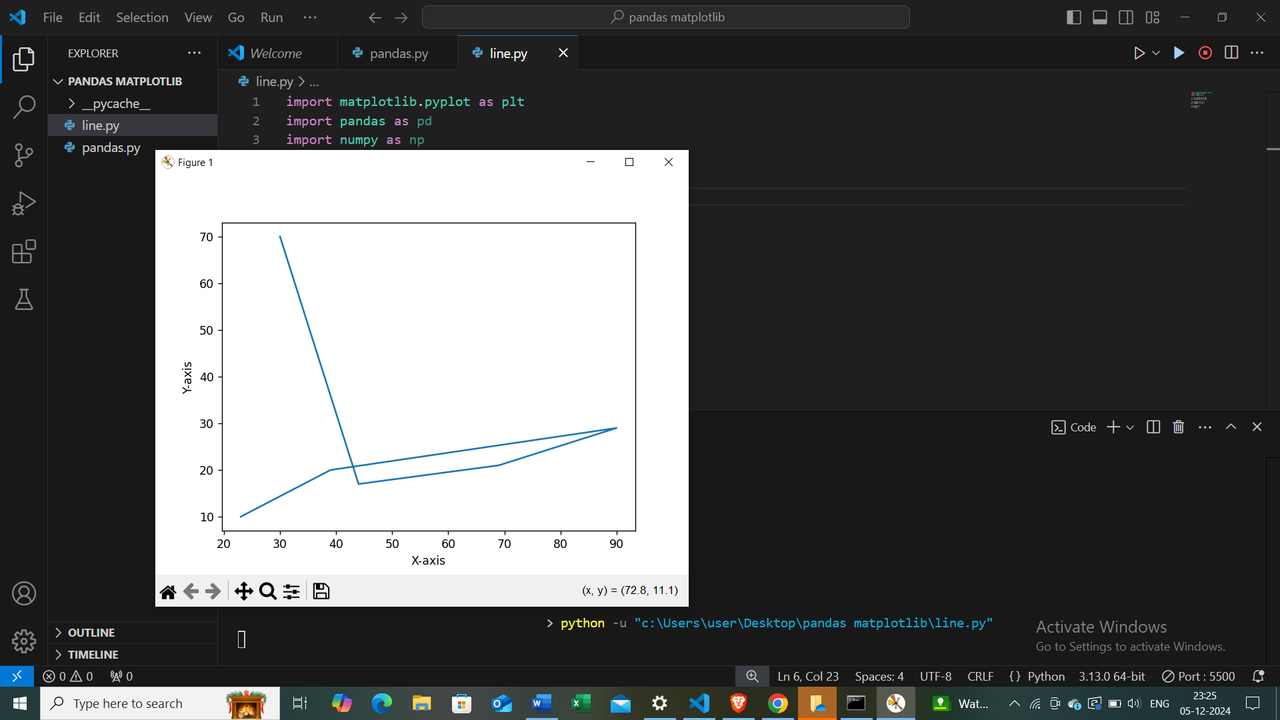
TASK 6: Working with Pandas and Matplotlib
I learned how to plot the below graphs using Matplotlib & use the programs as given in the below image to obtain the respective graphs: click here to view codes
-
Bar Graph
-
Line Graph
-
scatter Graph
To view code click here
.png?token=GHSAT0AAAAAAC7MASWYLCWNV74H3AEQIRS6Z52Y27A)
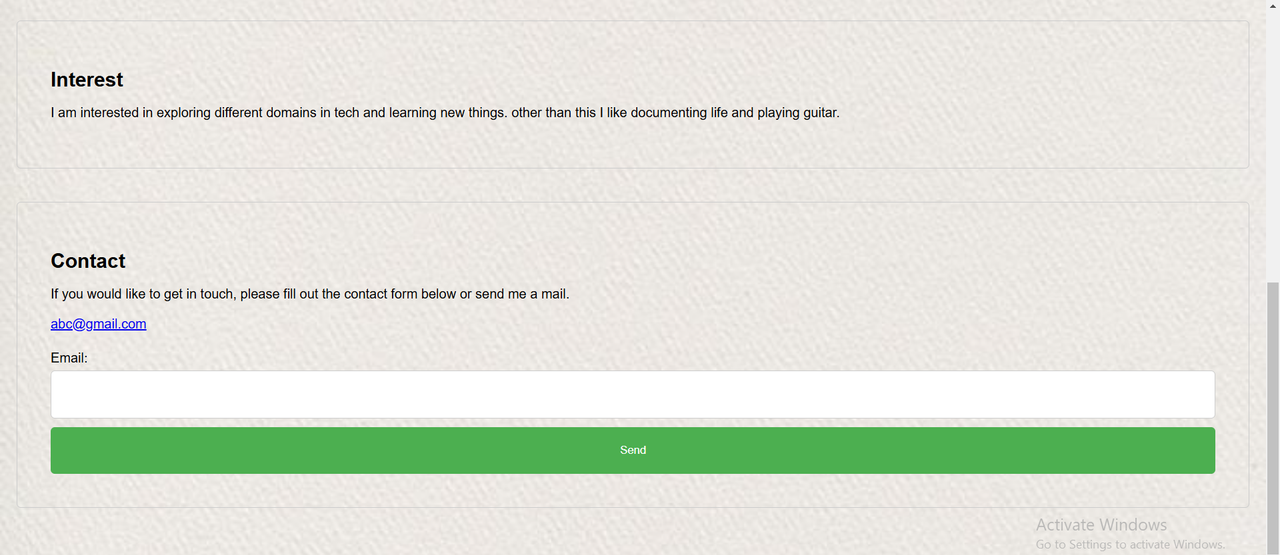
TASK 7: PORTFOLIO WEBPAGE
From this task i learned the basics of html and css.

 click here to view the code for html.
click here to view the code for html.
click here to view the code for css
TASk 8: RESOURCE ARTICLE
I wrote an article about evolution of electric vehicle, how the concept of EV's started and few factors leading to exponetial growth of this sector.
To veiw the articleclick here
TASK 9: TINKERCAD:
In this task i created a tinkercad account and made a simple circuit using ultrasonic sensor to estimate the distance between an obstacle and the sensor.
components required
- Arduino uno
- jumper wires
- Ultrasonic distance sensor
- Micro servo
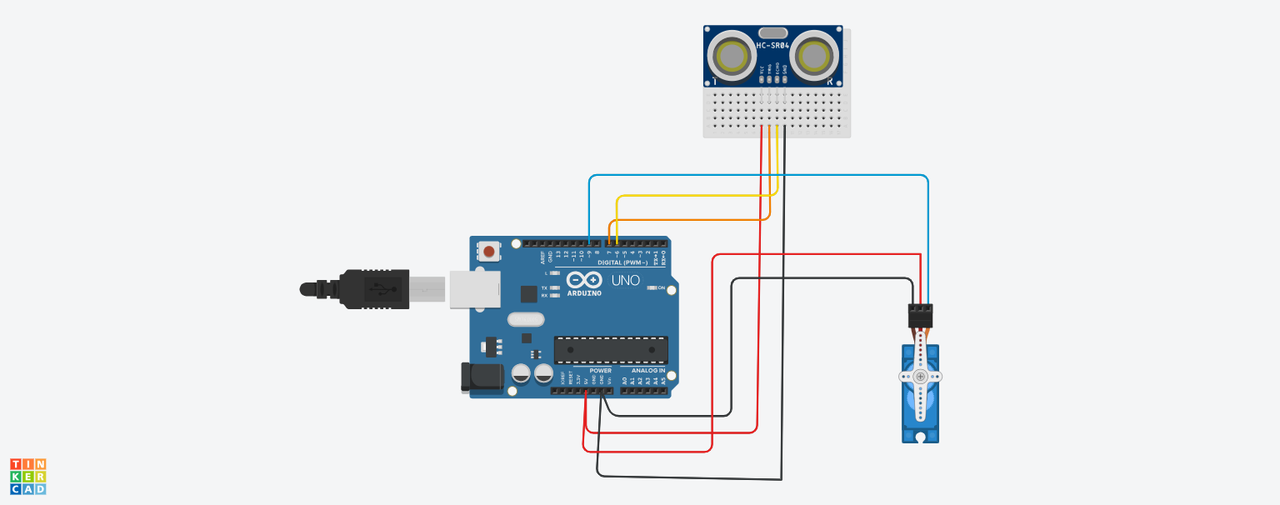
working principle :
-The sensor emits ultrasonic waves which has a frequency higher than human hearing.
-These waves travel through the air and reflect off objects in their path.
The sensor detects the echo (reflected wave) and measures the time it takes to return
-Using the time and the speed of sound
the distance is calculated.
-The servo motor rotates the ultrasonic sensor to scan a wider area.
TASK 10: SPEED CONTROL OF DC MOTOR
Through this task i gained knowledge about DC motor, I understood how to control a DC motors using the L298N motor driver and the Arduino board. I also learned to control the speed of a 5V BO motor to control the speed of a 5V BO motor.
- Below is the image of the circuit
![alt text]()
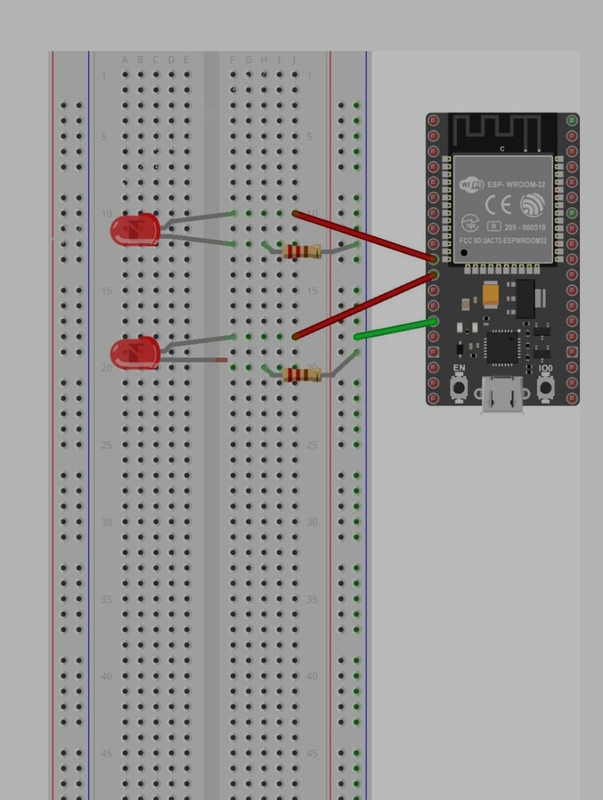
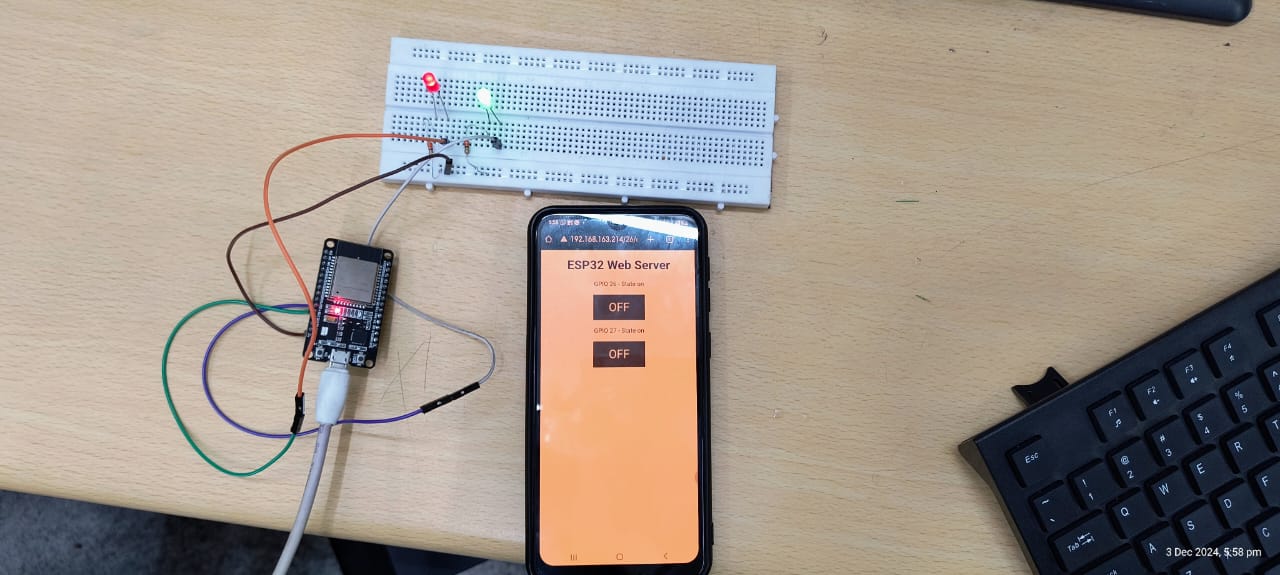
TASK 11: LED TOGGLE USING ESP32
Before making the circuit assembly, I learned about ESP32 by referring the article given in the marvel website.
Components required
- ESP32 development board
- 2x 5mm LED
- 2x 330 Ohm Resistor
- Breadboard
- Jumper wires
TASK 12: SOLDERING
By performing this task I learnt how to use the soldering iron and solder.Before performing the task we should make sure that the soldering iron is heated.For this task i kept the temperature in between 270-300 degree celsius.

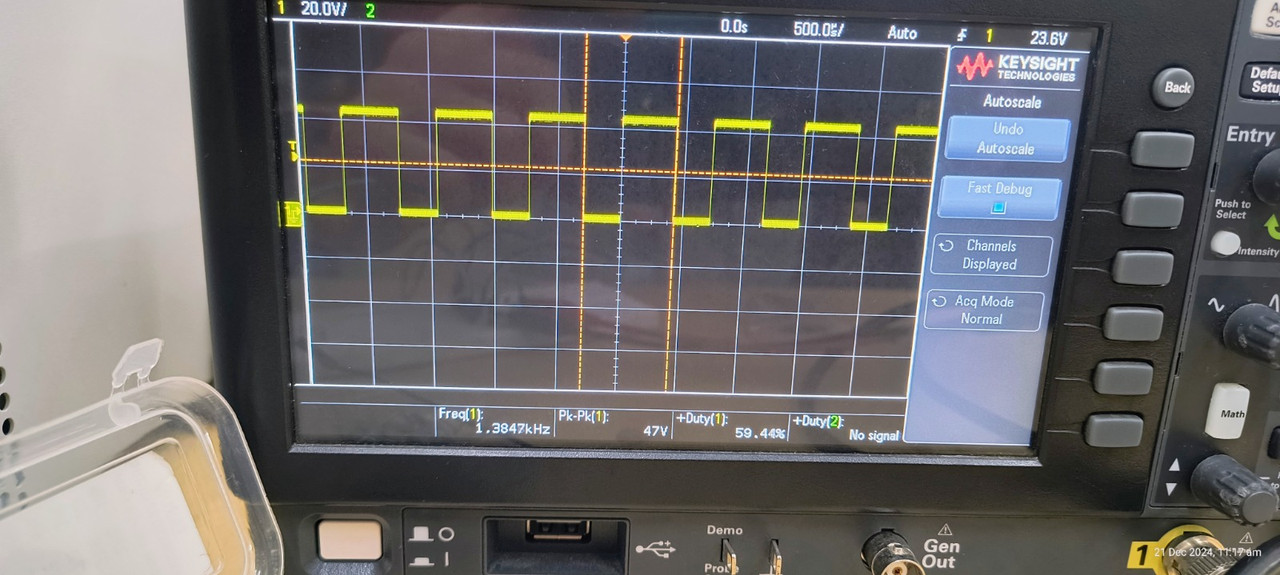
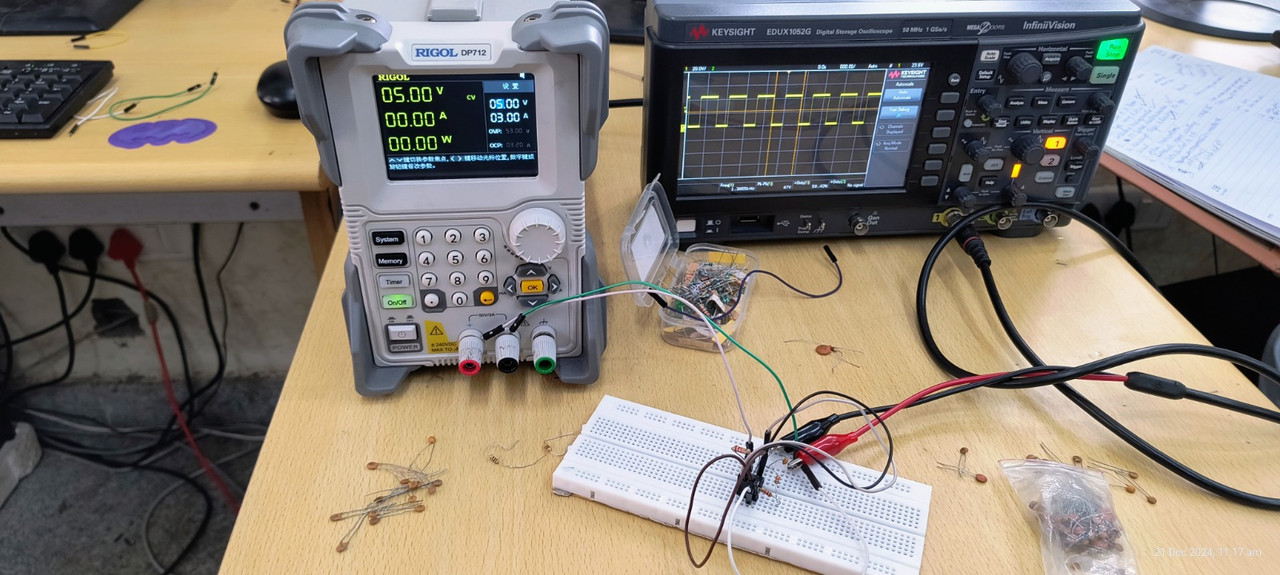
TASK 13: 555 ASTABLE MULTIVIBRATOR
To learn about the components of 555 IC and connections,I went through the resource link given in the course work.
COMPONENTS REQUIRED
- 555 IC Timer
- Capacitors (C1 & C2-0.1μF )
- Resistors (R1=10kΩ & R2=20kΩ)
- VRPS (5V)
- Oscilloscope
DUTY CYCLE
CIRCUIT
I got a duty cycle of 59.44%.
 (<555 Duty cycle.jpg>)
(<555 Duty cycle.jpg>)
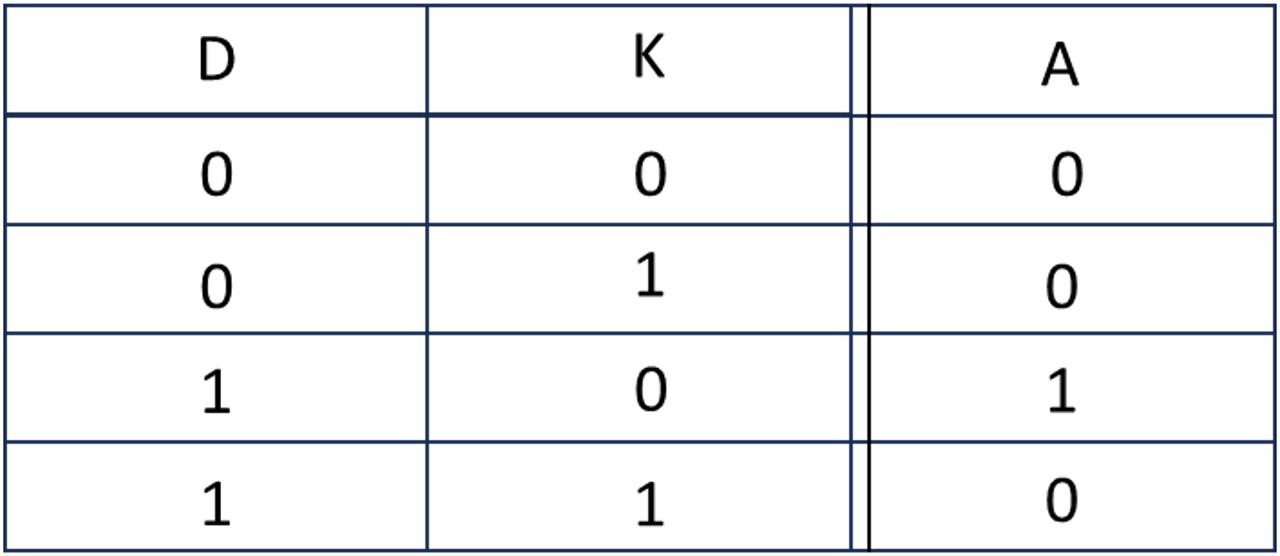
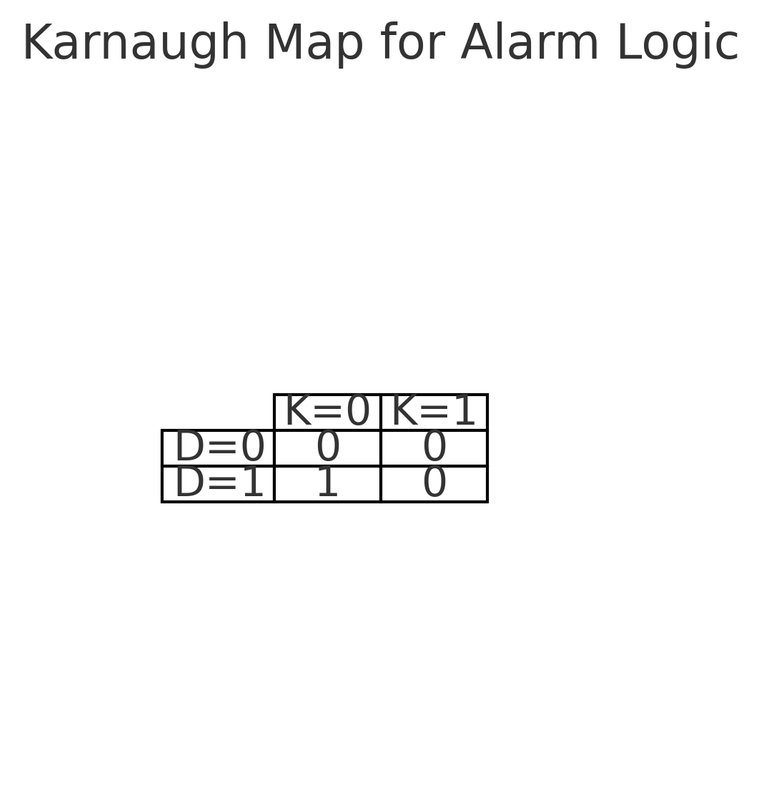
TASK 14: KARNAUGH MAPS AND DERIVING LOGIC CIRCUITS :
Let us conisder the following:
Door = D, closed = 0, open = 1.
Key = K, closed = 0, open = 1.
Alarm = A, active = 1, inactive = 0.
TRUTH TABLE
KARNAUGH TABLE
 Here is the simulation video below.
Here is the simulation video below.
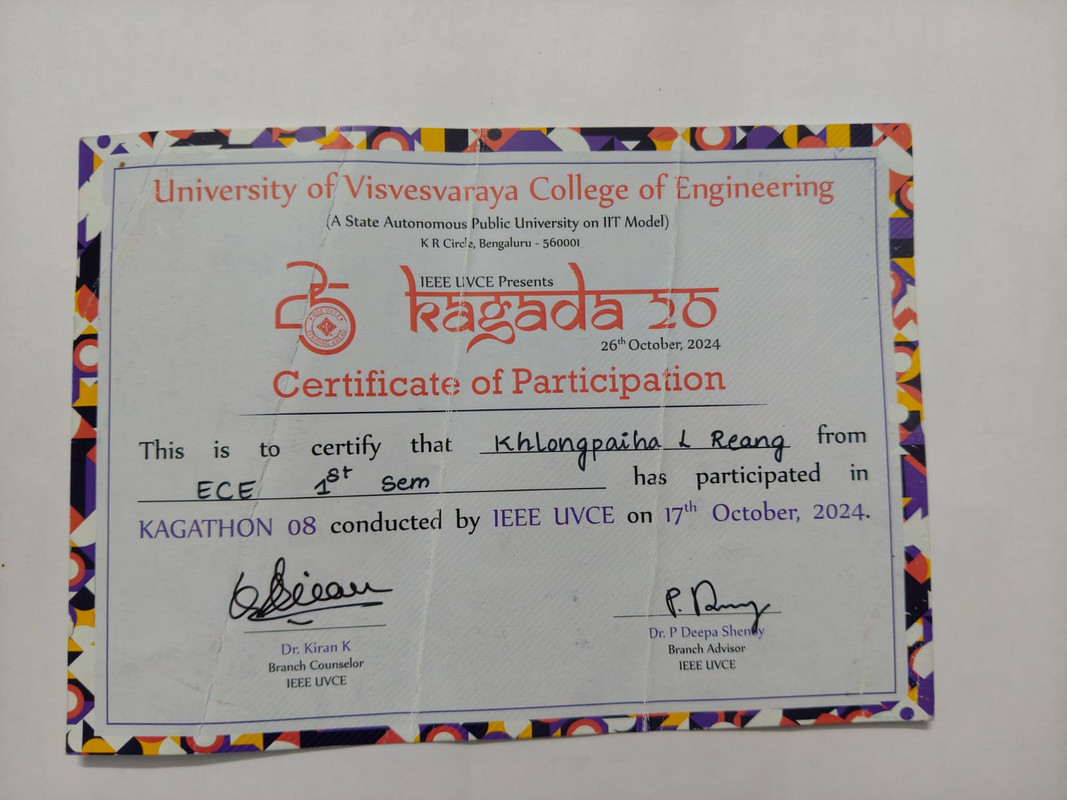
TASK 15: ACTIVE PARTICIPATION:
I partcipated in the kagathon event.
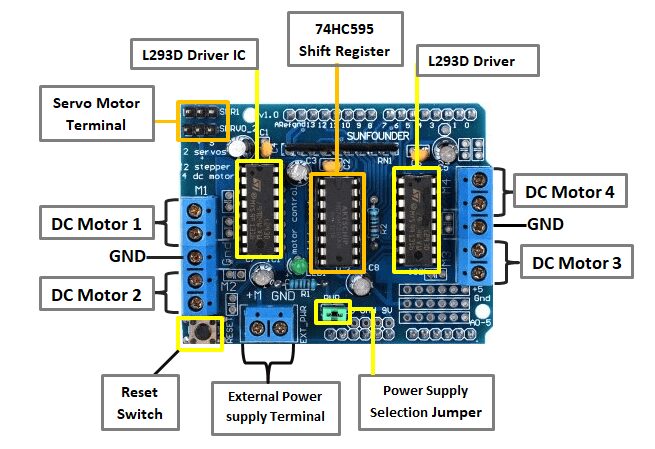
TASK 16 : L293D report writing:
OBJECTIVE: Study the datasheet of L293D motor driver and write a report on it. Specify about the ICs used in L293D, PWM, H-bridge etc.
Introduction
The L293D is a basic motor driver integrated chip that enables us to drive a DC motor in either direction and control the speed of the motor. This means it can drive up to two motors individually which makes it ideal for building a two-wheeled robotic platform
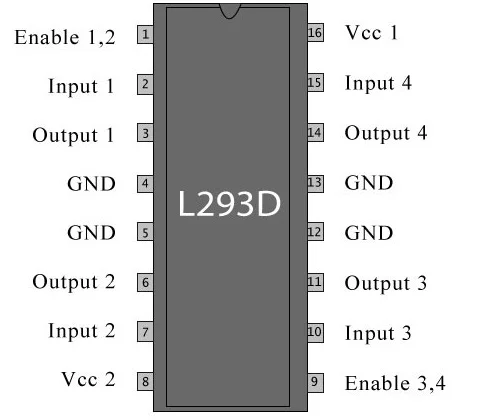
Pinout of L293D:
Input Pins (IN1, IN2, IN3, IN4): Control the direction of motors. Output Pins (OUT1, OUT2, OUT3, OUT4): Connect to motor terminals.
ENABLE1 (Pin 1): Activates OUT1 and OUT2 (for motor 1). ENABLE2 (Pin 9): Activates OUT3 and OUT4 (for motor 2).
Power Pins:
VCC1 (Pin 16): Logic supply voltage. VCC2 (Pin 8): Motor supply voltage.
Ground Pins:
GND (Pins 4, 5, 12, 13): Common ground for the motor and logic circuit
PWM(Pulse Width Modulation)-
PWM is a technique used to control the speed of motors by varying the width of the pulses sent to the motor's enable pins.
Working-The enable pins (ENABLE1 and ENABLE2) on the L293D are connected to a PWM signal. By changing the duty cycle of the PWM signal, we can control how fast the motor spins.
H-Bridge - To control the direction of motor
The spinning direction of a DC motor can be controlled by changing the polarity of its input voltage. A common technique for doing this is to use an H-bridge. An H-bridge circuit consists of four switches with the motor in the centre forming an H-like arrangement. Closing two specific switches at a time reverses the polarity of the voltage applied to the motor. This causes a change in the spinning direction of the motor.