
COURSEWORK
Swaroop's CL-CY-001 course work. Lv 1
| Swaroop | AUTHOR | ACTIVE |
Swaroop'S CL-CY L-001 course work.
13 / 9 / 2025
Level-1 Final Report
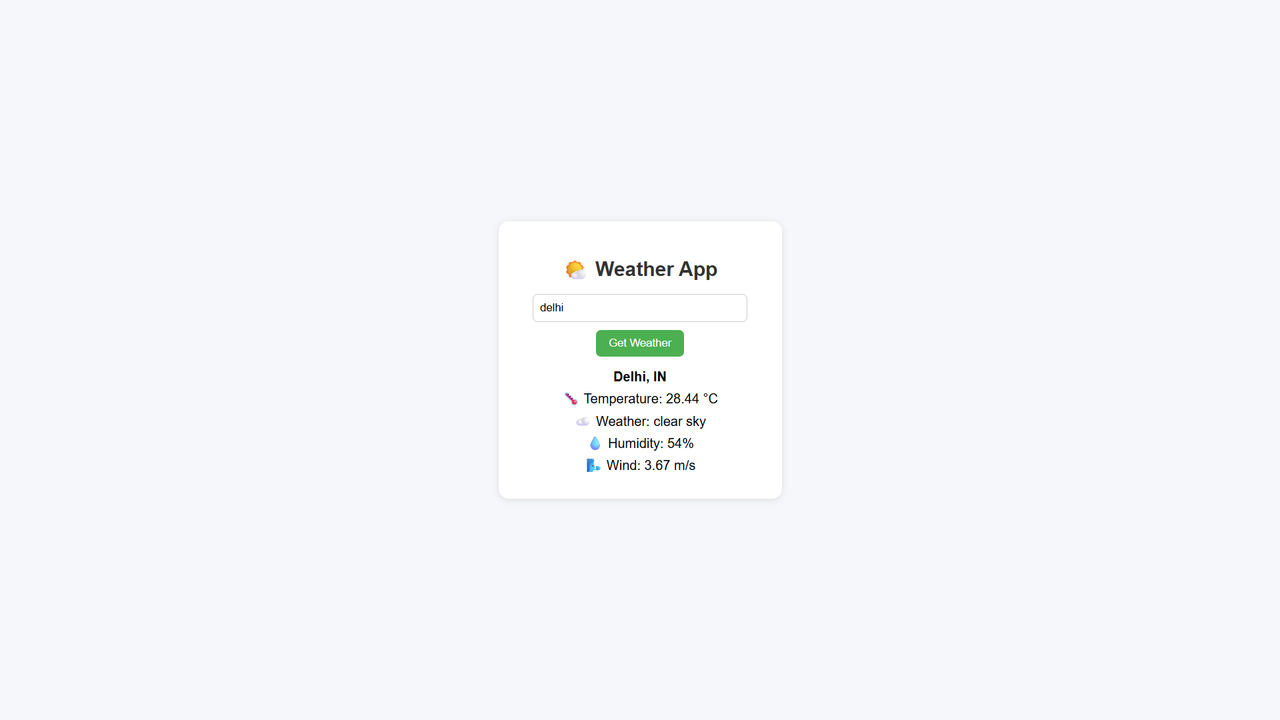
Task 2: Calling all API
An API (Application Programming Interface) is a set of rules and tools that allow different software applications to communicate with each other.
It acts like a middleman or waiter, taking requests from a customer and serving the desired data.
In this task, I used an API key from Weather API.
What I Learned
- How APIs work.
- The role of tokens and how to modify APIs according to our needs.
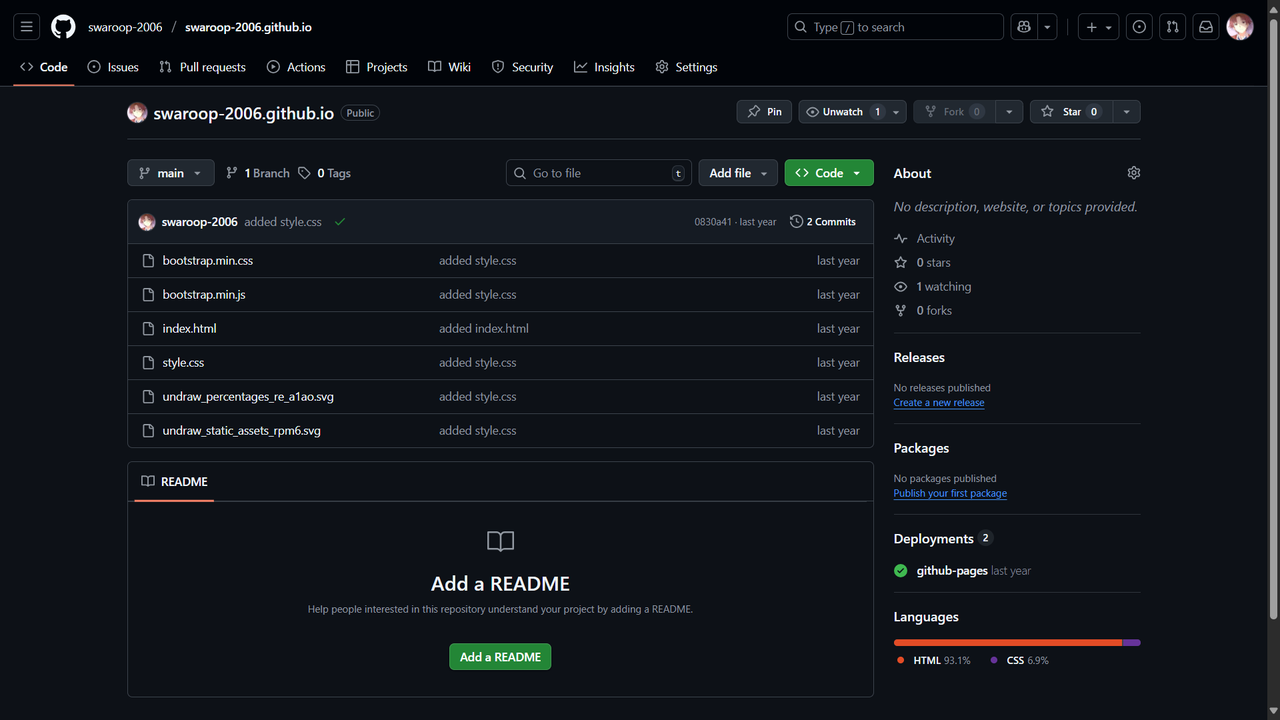
Task 3: Working with GitHub
GitHub is a version control platform where I can push code to a remote repository and track changes over time.
Using Git, I can store code locally, update it later, and roll back changes when needed.
GitHub also supports team collaboration by allowing multiple people to work together and merge changes safely.
What I Learned
- Creating a Git repository locally.
- Pushing the repository to GitHub.
- Writing commits.
- Updating code using version control.
- Resolving merge conflicts.
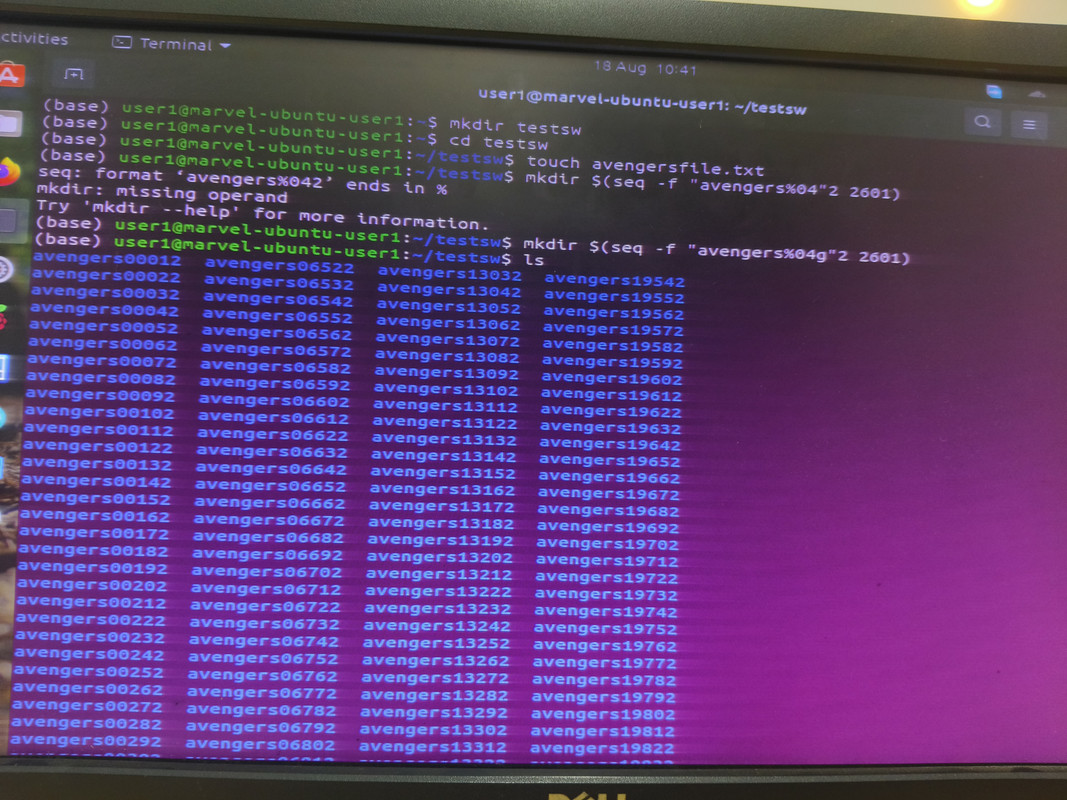
Task 4: Getting Familiar with Command Line Interface on Ubuntu
Ubuntu is a popular, open-source Linux operating system based on Debian.
It is secure, user-friendly, and widely used for software development.
Tasks Performed
- Created a folder named
testswusingmkdir. - Created a blank file called
avengersfileinside the folder usingtouch. - Created 2600 folders using the command:
mkdir $(seq -f "avengers%04g" 2 2601) - Concatenated two text files using the
catcommand.
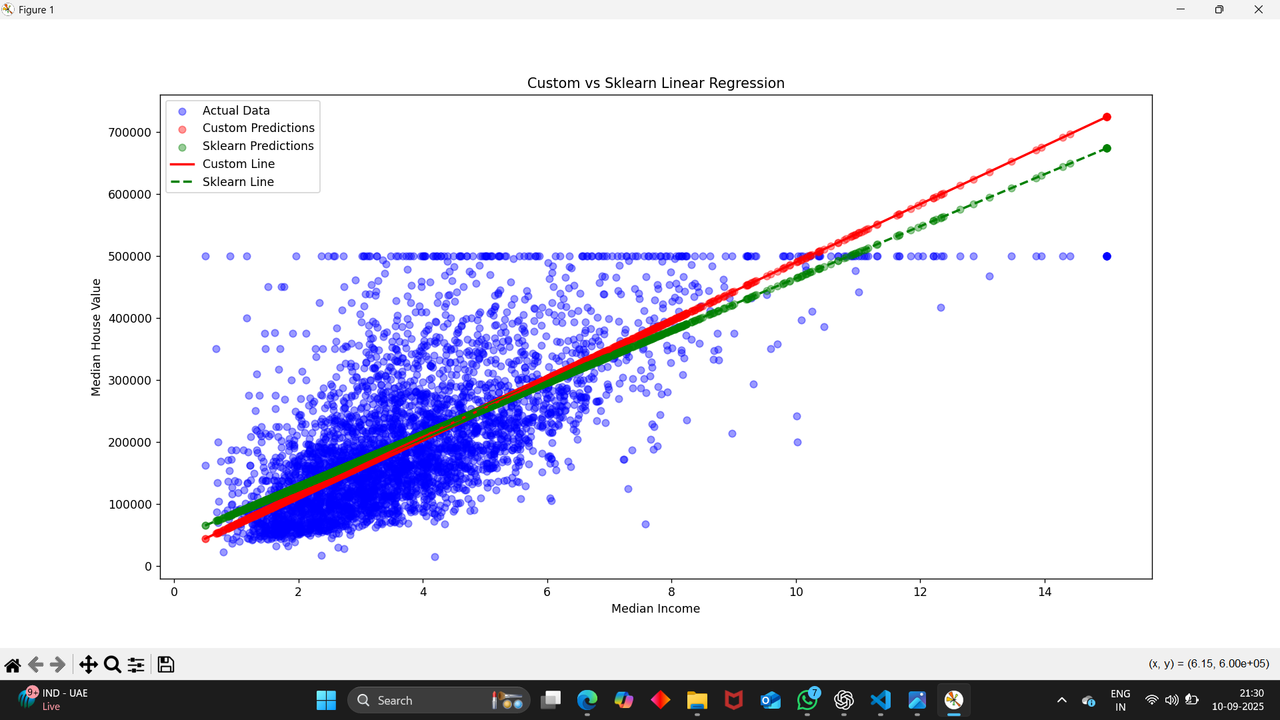
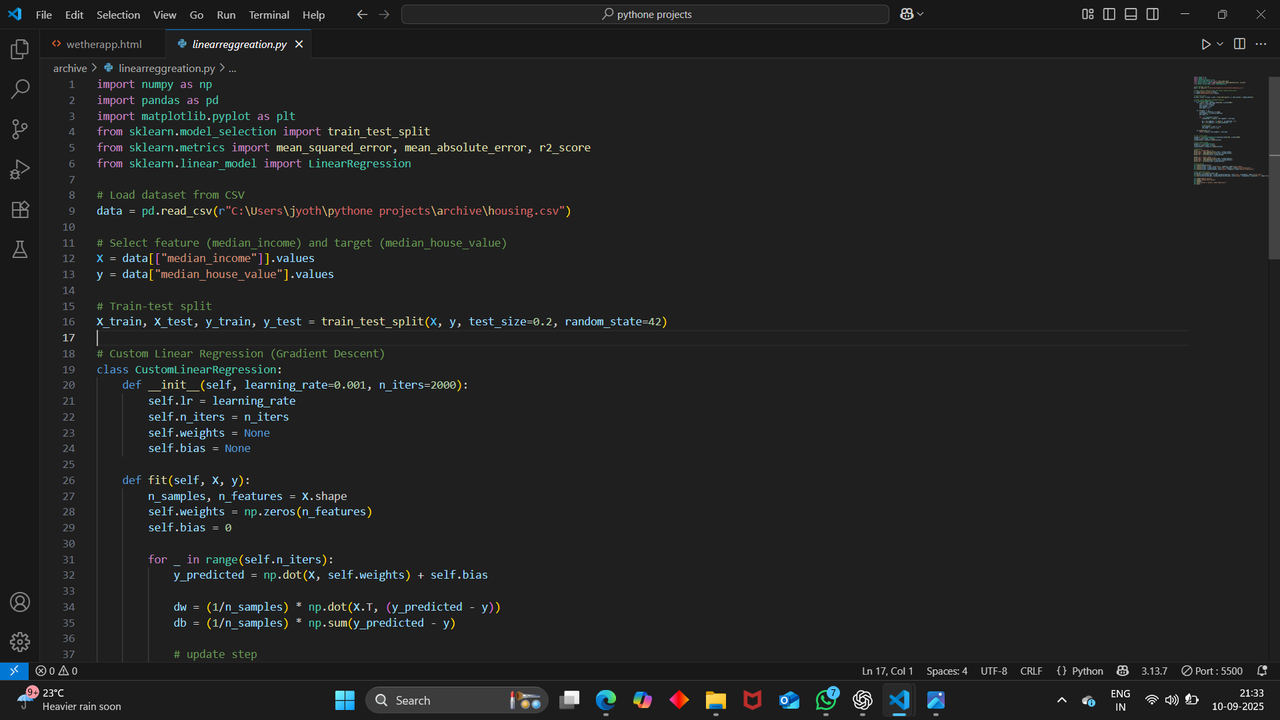
Task 5: Linear Regression from Scratch
Linear Regression helps predict missing data by learning patterns from a dataset.
For example, it can predict future gold prices based on historical data.
Key Concepts
- Used the California Housing Dataset.
- Implemented from scratch using NumPy, Pandas, Matplotlib, and Scikit-Learn.
- Applied the Gradient Descent algorithm to minimize prediction error.
Observations
- Blue dots represent predicted values.
- Red dots represent real values.
- As the dataset size increases, prediction accuracy improves.
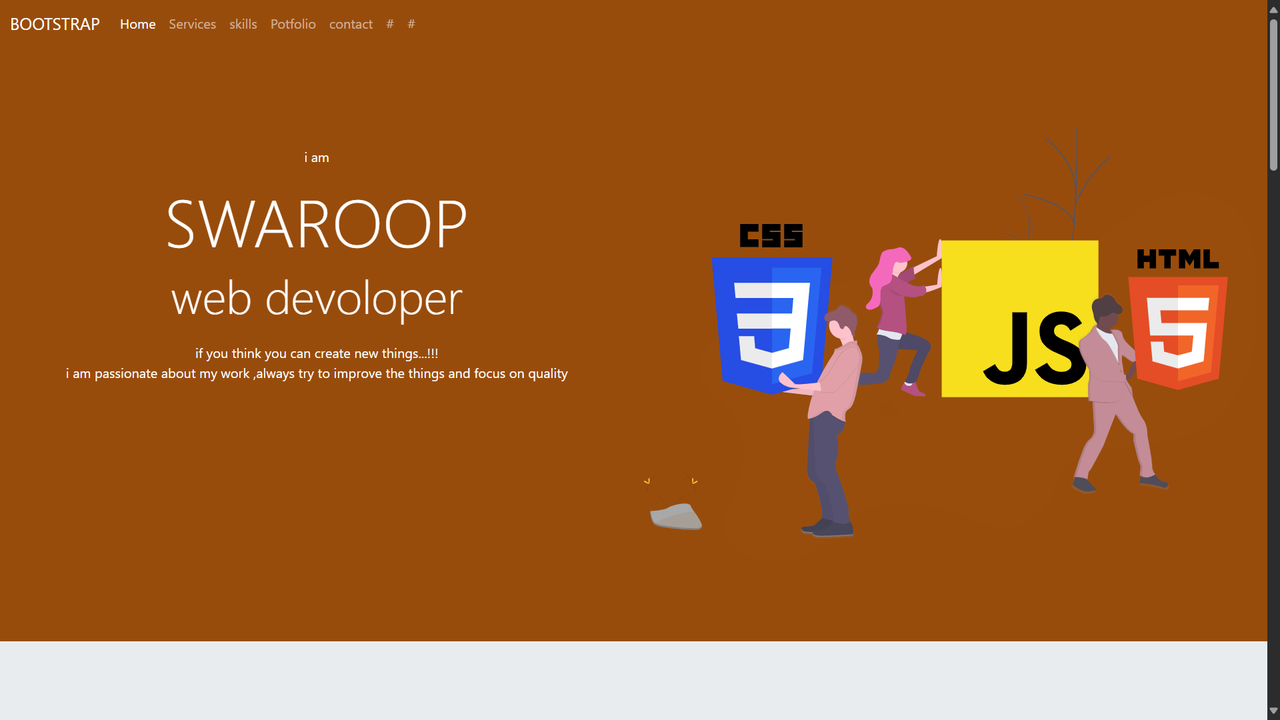
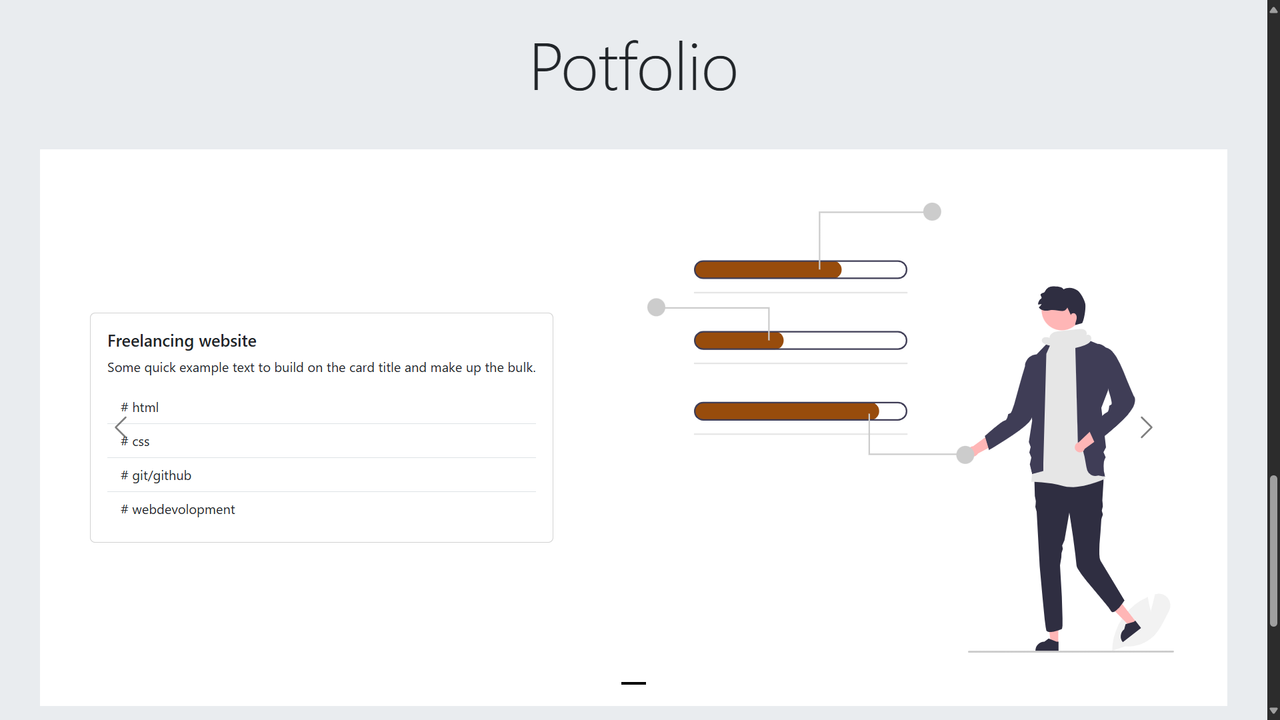
Task 7: Created a Portfolio Webpage
I created my portfolio website using HTML and CSS and deployed it on GitHub.
Features
- Skills section.
- Portfolio showcasing my projects.
- Responsive layout using margin and section properties.
Tutorial Source: Sudopower YouTube Channel.
Task 8: Writing Resource Article using Markdown
My Learning Report on One Wing Drone
What I Learned
- Aerodynamics: Single-wing drones use stabilizers and advanced control algorithms to maintain flight stability.
- Advanced Algorithms: Flight controllers process sensor data in real-time to maintain balance.
- Material Science: Lightweight materials such as carbon fiber are essential.
- Applications & Limitations: Used in surveillance, agriculture, and military; sensitive to payload and wind conditions.
- Future Potential: AI will help make one-wing drones smarter and more autonomous.
Conclusion
Studying the One Wing Drone taught me how innovation can break traditional designs.
I understood how aerodynamics, control systems, and material science combine to allow a drone to fly efficiently with only one wing.
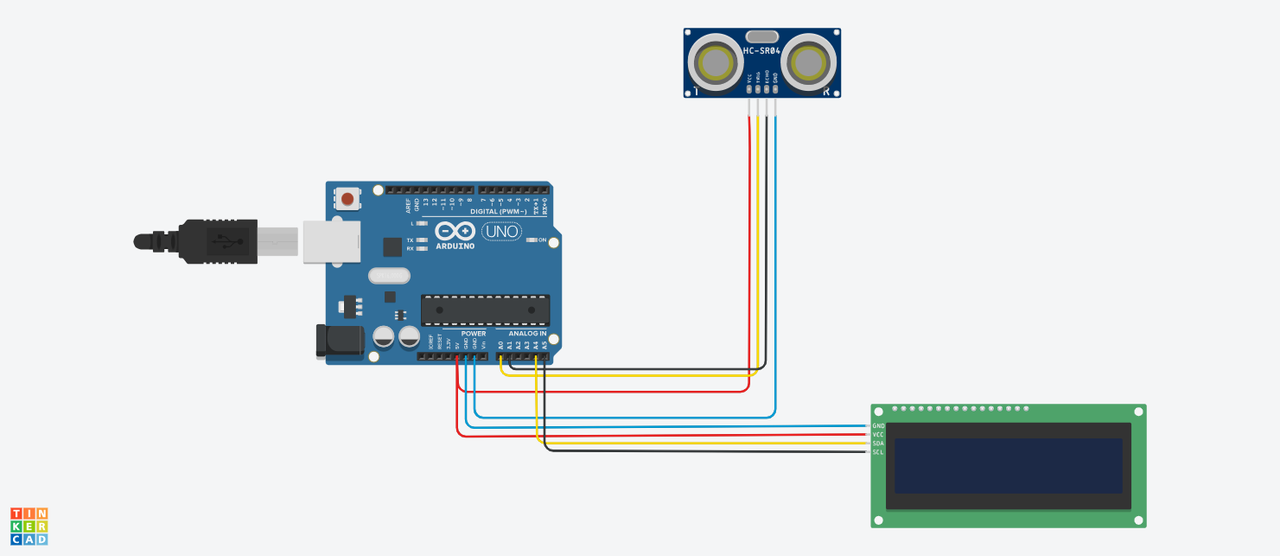
Task 9: Tinkercad
Tinkercad is a virtual electronics simulator platform, ideal for learning circuit design without hardware.
Task Performed
- Created a circuit to measure the distance between a sensor and an obstacle.
- Helped me understand the practical application of sensors in electronics.
Link to project:
View My Project
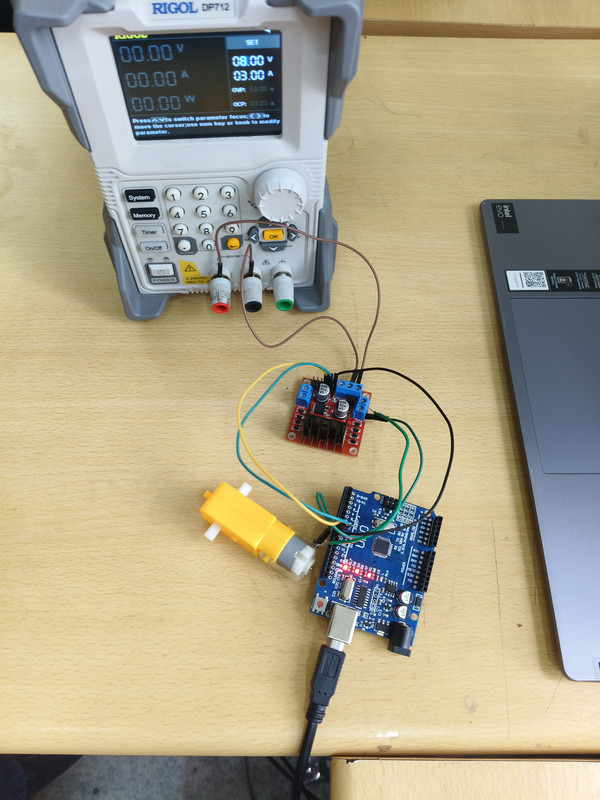
Task 10: Speed Control of DC Motor
In this task, I used an Arduino board and L298N H-Bridge Motor Driver IC to control the speed and direction of a DC motor.
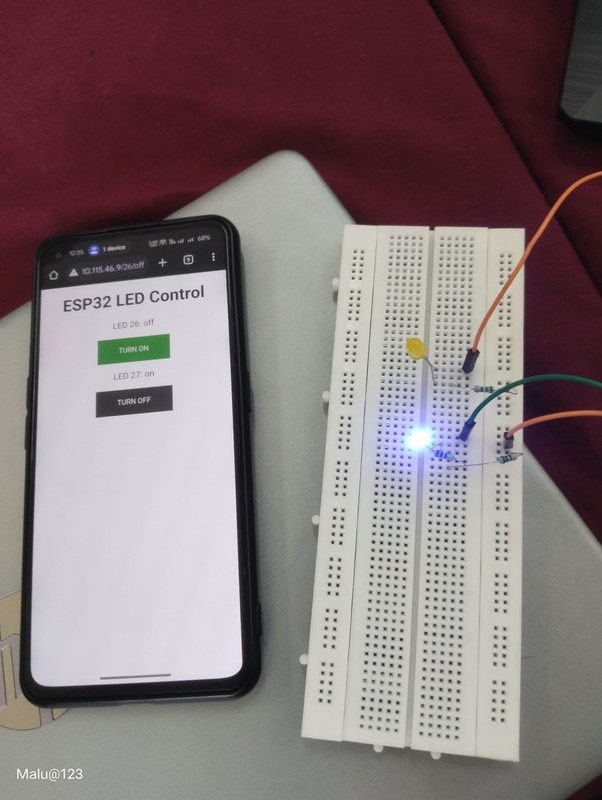
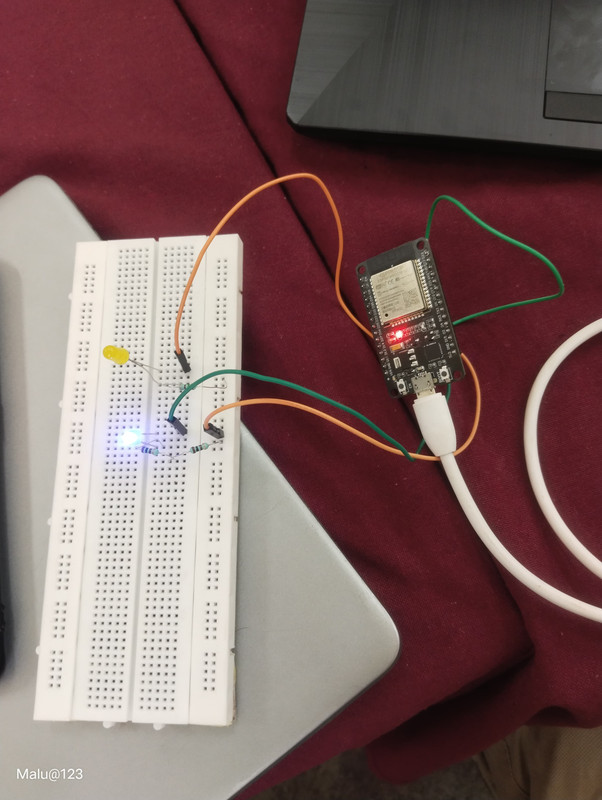
Task 11: LED Toggle using ESP32
What I Learned
- ESP32 is a powerful microcontroller with built-in Wi-Fi and Bluetooth.
- I configured the Arduino IDE by adding the ESP32 board URL and selecting the correct board and port.
- Created a web server to remotely control an LED connected to ESP32 GPIOs.
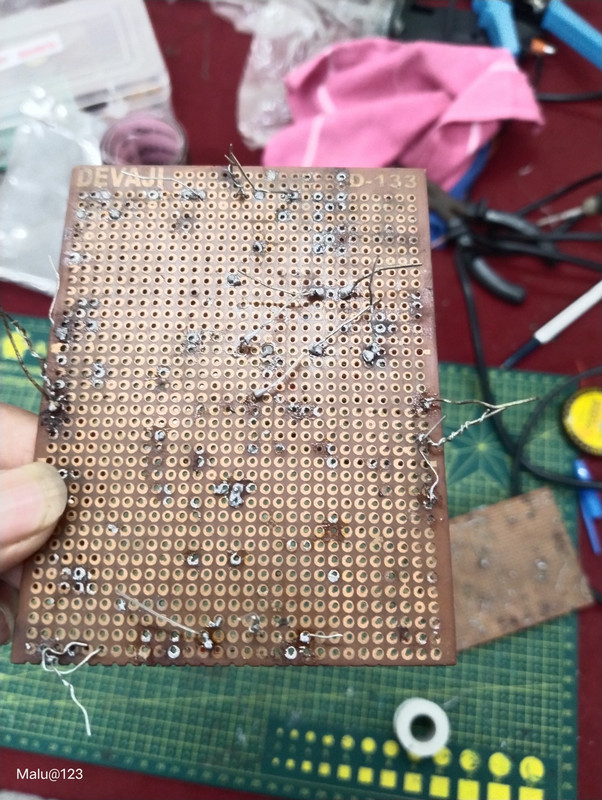
Task 12: Soldering Prerequisites
Learned about the soldering equipment available in our lab:
- Soldering iron
- Solder
- Flux
- Wick
I practiced soldering an LED circuit on a perf board.
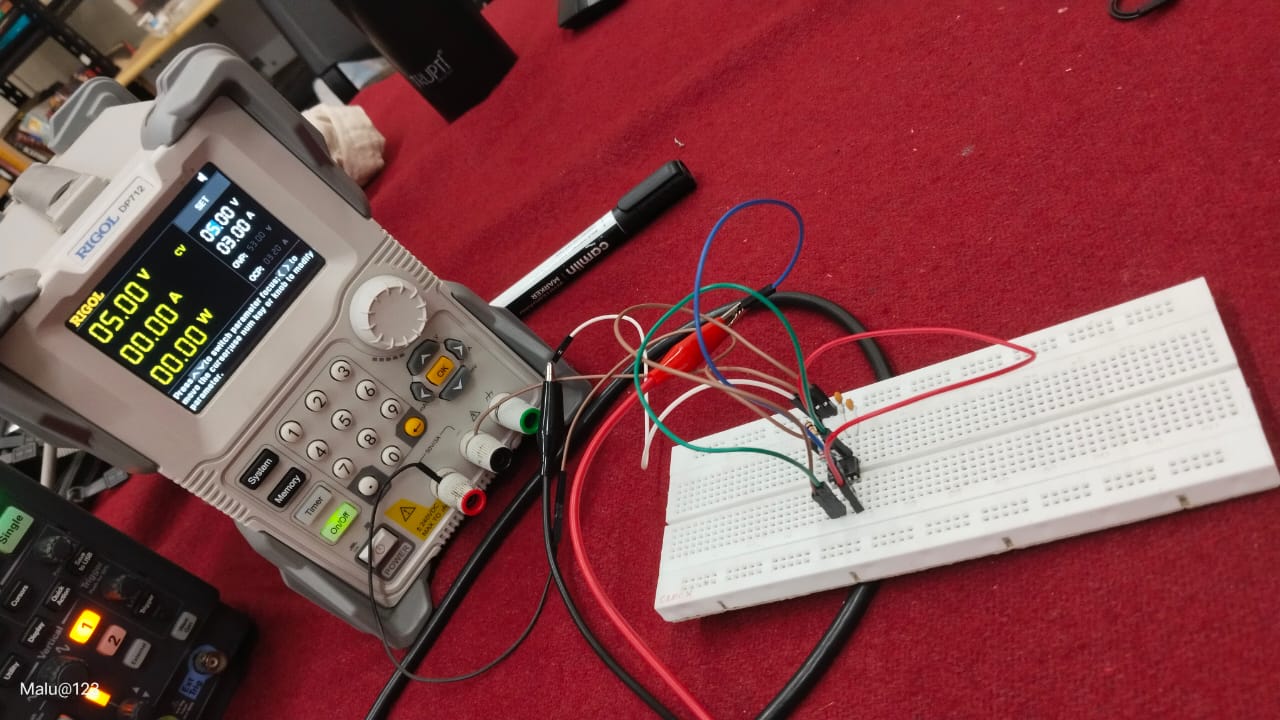
Task 13: 555 Astable Multivibrator Design
Designed a 555 Timer Astable Multivibrator circuit with a 60% duty cycle on a breadboard.
Observed the output using probes.

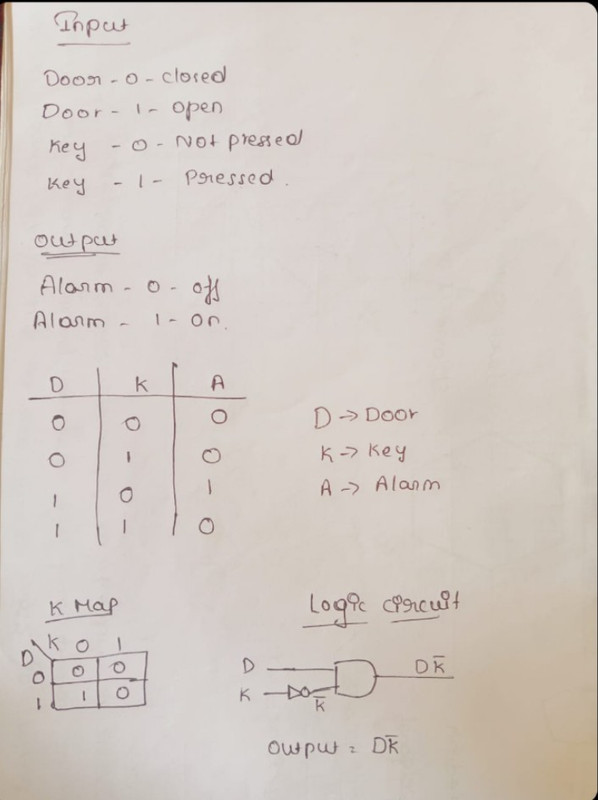
Task 14: Karnaugh Maps and Deriving the logic circuit
I worked on a simple burglar alarm system using K-maps and logic gates. By analyzing different door and key conditions, I simplified the logic with a K-map and built a circuit where a buzzer turns on for certain cases. It helped me understand how logic gates work in real-life setups .
Task 15: Active Participation

Task 16: Datasheets report writing
echnical Report: L293D Motor Driver IC
- Introduction
The L293D is a quadruple high-current half-H driver IC designed to control bidirectional drive currents of up to 600 mA per channel at voltages ranging from 4.5 V to 36 V. It is widely used in robotics and automation systems to drive inductive loads such as relays, solenoids, DC motors, and bipolar stepping motors. Texas Instruments
- IC Components and Internal Structure
The L293D integrates four half-H drivers, each capable of driving a motor in both directions. Each output is a complete totem-pole drive circuit, featuring a Darlington transistor sink and a pseudo-Darlington source. This configuration allows for efficient current handling and bidirectional control. Texas Instruments
- H-Bridge Configuration
The L293D utilizes an H-bridge configuration to control the direction of current flow through the motor. An H-bridge consists of four switches arranged in a bridge-like structure, enabling the polarity of the voltage applied to the load (motor) to be reversed. This allows the motor to rotate in both clockwise and counterclockwise directions. Wikipedia
- Pulse Width Modulation (PWM) for Speed Control
The L293D supports speed control through Pulse Width Modulation (PWM). By applying a PWM signal to the enable pins (1,2EN and 3,4EN), the effective voltage supplied to the motor is varied, thereby controlling its speed. A higher duty cycle increases the average voltage, resulting in higher motor speed, while a lower duty cycle decreases the speed. ProtoSupplies
- Applications
Robotics: Used to drive wheels and actuators.
Automation Systems: Controls motors in conveyor belts and automated machinery.
Consumer Electronics: Drives motors in devices like fans and toys.
- Conclusion
The L293D motor driver IC is a versatile and reliable component for controlling DC motors and stepper motors in various applications. Its integrated H-bridge configuration and support for PWM speed control make it an essential part of many electronic systems.
Technical Report: MQ135 Gas Sensor
- Introduction
The MQ135 is a semiconductor gas sensor designed to detect a wide range of gases, including ammonia (NH₃), benzene series, alcohol, and smoke. It is widely used in air quality monitoring systems due to its sensitivity and cost-effectiveness. Winsen Sensors
- Calibration for Different Gases
The sensor's resistance varies with the concentration of gases. Calibration involves determining the sensor's resistance in clean air (Ro) and at known concentrations of target gases (Rs). The ratio Rs/Ro is used to estimate the gas concentration. For example, approximate Rs/Ro values at different concentrations are:
Ammonia (NH₃):
50 ppm: Rs/Ro ≈ 3.6
100 ppm: Rs/Ro ≈ 2.2
500 ppm: Rs/Ro ≈ 0.6
Carbon Dioxide (CO₂):
50 ppm: Rs/Ro ≈ 4.0
100 ppm: Rs/Ro ≈ 2.5
500 ppm: Rs/Ro ≈ 0.7
Benzene:
50 ppm: Rs/Ro ≈ 5.0
100 ppm: Rs/Ro ≈ 3.0
500 ppm: Rs/Ro ≈ 1.0
hub.uvcemarvel.in
- Freundlich Absorption Theorem
The sensor's response to gas concentration follows the Freundlich adsorption isotherm, expressed as:
𝑥 / 𝑚
𝑘 𝑃 1 / 𝑛 x/m=kP 1/n
Where:
x/m: Amount of gas adsorbed per unit mass of adsorbent
P: Partial pressure of the gas
k: Adsorption capacity constant
n: Empirical constant (n > 1)
This equation models the adsorption behavior of gases on the sensor's surface, aiding in understanding and predicting sensor responses. hub.uvcemarvel.in
- Applications
Air Quality Monitoring: Detects pollutants in indoor and outdoor environments.
Industrial Safety: Monitors hazardous gas levels in factories.
Consumer Electronics: Integrated into devices like smart air purifiers.
- Conclusion
The MQ135 gas sensor is a valuable tool for detecting a variety of gases. Understanding its calibration and the underlying adsorption principles enhances its application in environmental monitoring and safety systems.
Task 19: Make a web app
I developed a simple web-based Stone-Paper-Scissor game using HTML, CSS, and JavaScript. The game allows the user to choose between stone, paper, or scissor and plays against the computer, which makes a random choice. The result is displayed immediately, showing whether the user wins, loses, or draws. The interface is user-friendly, responsive, and visually appealing, providing instant feedback. This project helped me understand DOM manipulation, event handling, and basic game logic implementation. It is a fun interactive project that demonstrates core web development concepts and improves user interaction skills.
