✅ Basic UAV Assembly & Components Familiarization
📌 Objective
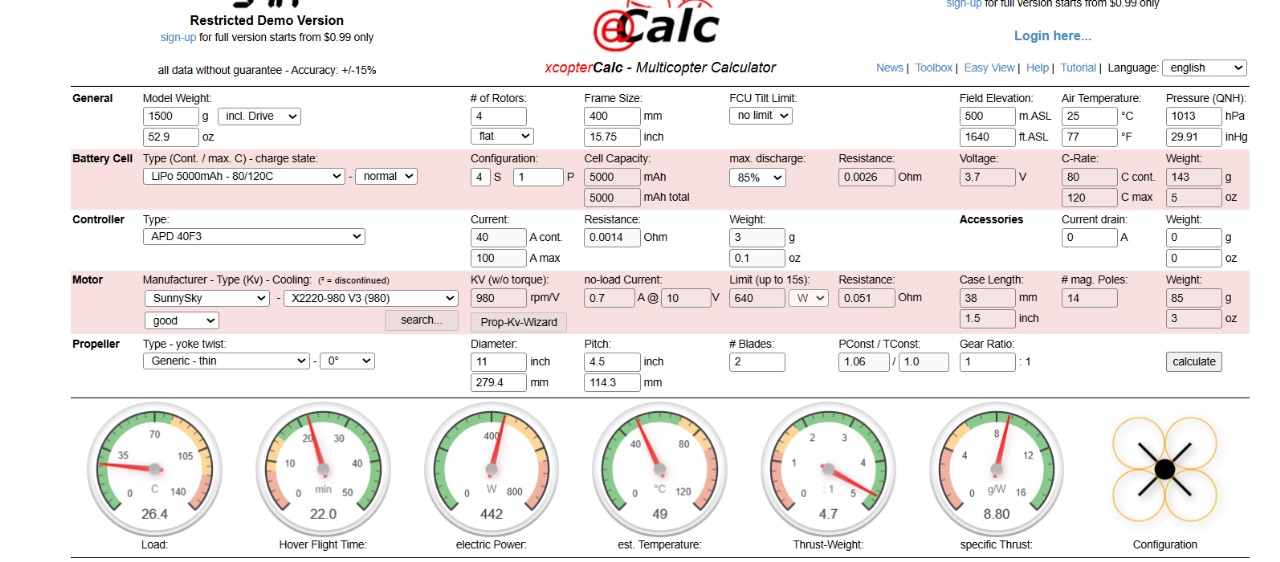
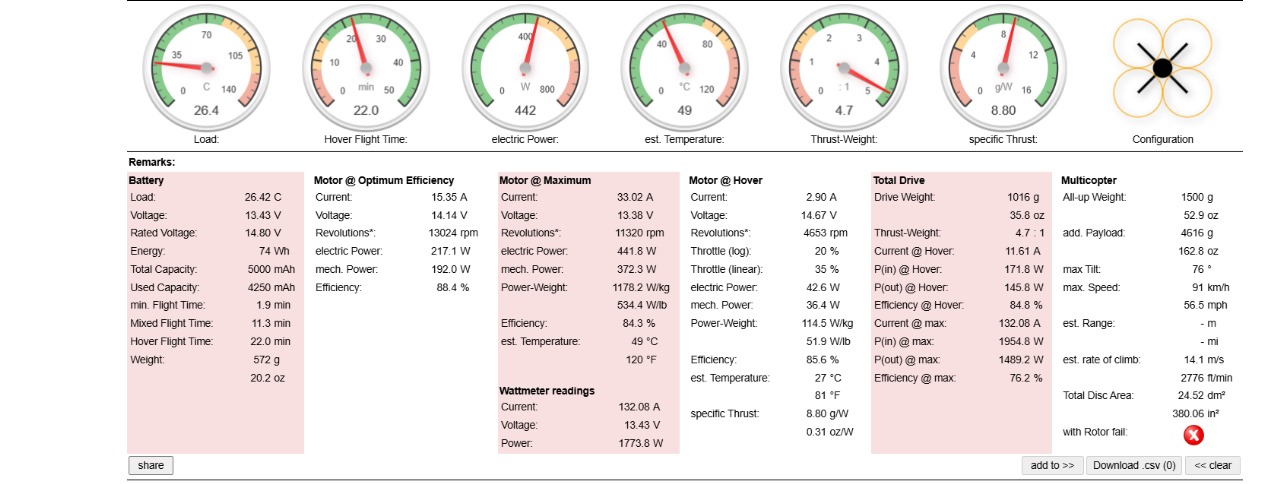
To identify, understand, and select key UAV components (flight controller, ESCs, motors, propellers, batteries), ensure their compatibility, manually calculate thrust-to-weight ratio and flight time, and verify these results using E-Calc.
✈️ 1️⃣ Essential UAV Components
🎛️ Flight Controllers
| Controller | Key Features | Suitable For |
|---|---|---|
| Pixhawk | Open-source, GPS waypoint missions, auto-stabilization, telemetry, many sensors | Professional drones, research UAVs |
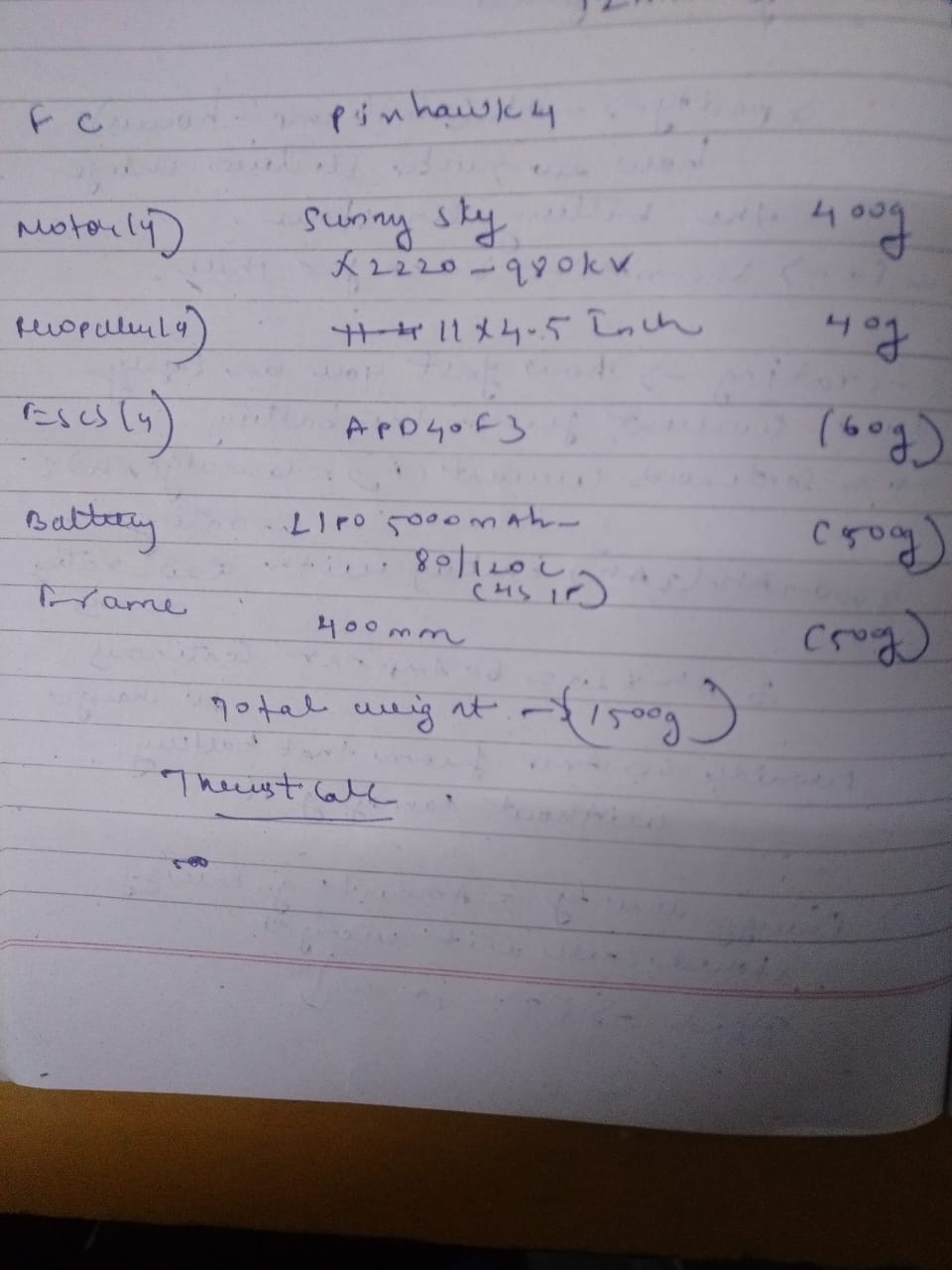
✅ Chosen: Pixhawk Reason: Better sensor support, active development, reliable community support for autonomous flight.
🔌 ESCs (Electronic Speed Controllers)
- Purpose: Convert FC PWM signals to motor power control.
- Must match motor current and battery voltage.
✅ Chosen: APD40F3
- Rated for 40 A continuous current.
- Compatible with our motor’s max draw (~12 A per motor).
⚙️ Motors
- Type: Brushless DC Motors (BLDC)
- Key spec: KV rating → RPM per Volt.
✅ Chosen: 980KV brushless outrunners
- Max thrust per motor: ~1750 g
- Suitable for 4S LiPo
- Provides enough thrust to achieve target T:W ratio.
🌀 Propellers
- Prop size chosen for motor’s thrust curve.
✅ Chosen: 11×4.5 inch props
- Balanced for good thrust and efficiency at moderate RPM.
- Matched with 980 KV motor for ~1750 g max thrust.
🔋 Batteries
| Type | Charge/Discharge | Pros | Cons |
|---|---|---|---|
| LiPo | 4.2 V full, 3.7 V nominal | High discharge rate (high C-rating), light weight | Needs careful handling |
| Li-ion | 4.2 V full, 3.7 V nominal | Higher energy density → longer flight time | Lower max current |
| NiMH | 1.2 V nominal | Safer, robust | Heavy, low energy density |
✅ Chosen: 4S 5000 mAh 80C LiPo
- High discharge for sudden thrust.
- Lightweight → good power-to-weight ratio.
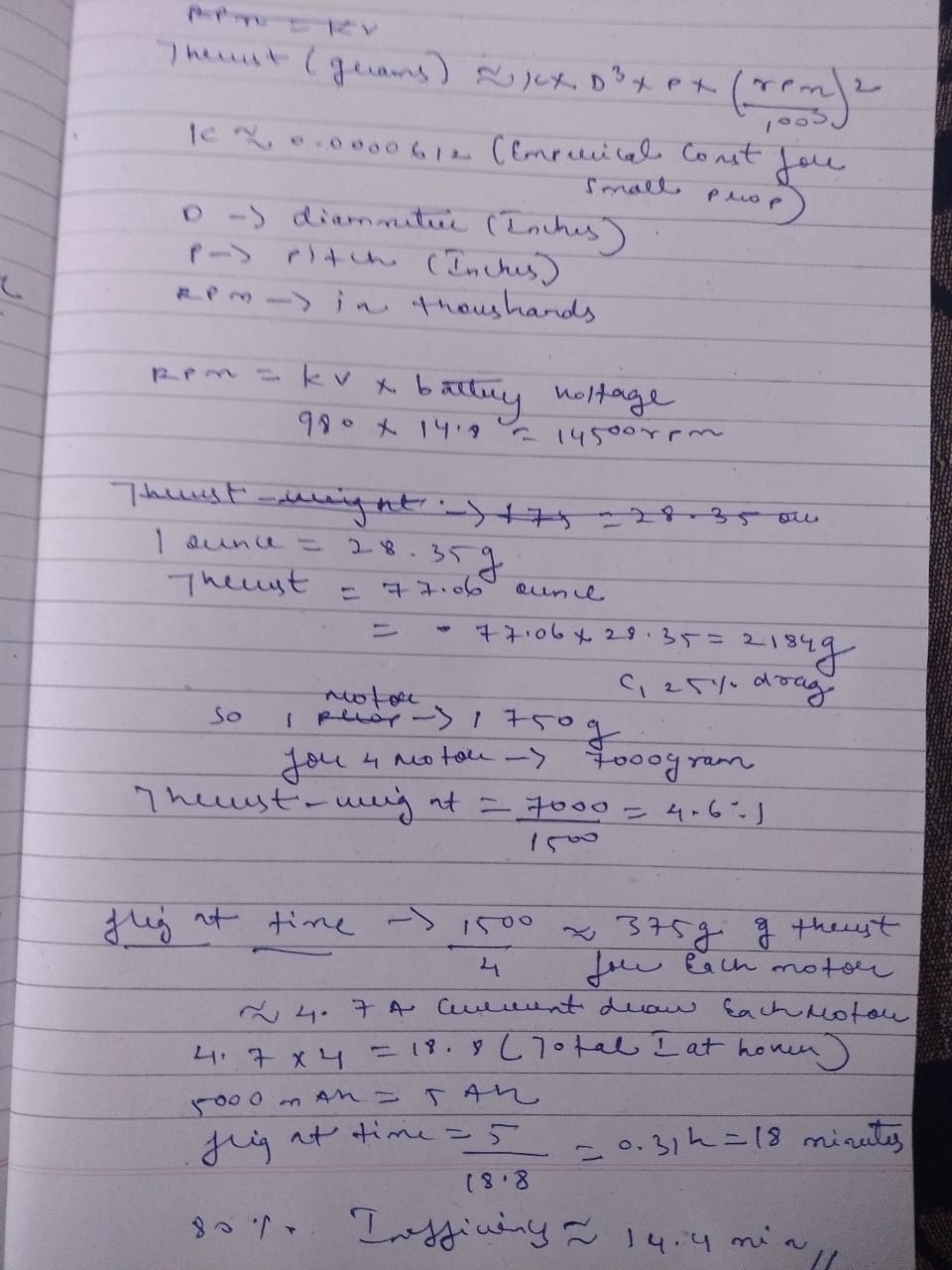
🧮 2️⃣ Manual Calculations
✅ A. Thrust-to-Weight Ratio
| Parameter | Value |
|---|---|
| Max thrust per motor | 1750 g |
| Total motors | 4 |
| Total max thrust | 4 × 750 g = 7000 g |
| Drone weight | ~1500 g (frame, electronics, battery) |
| T:W ratio | 7000 g / 1500 g = 4.6:1 ✅ |
✅ B. Hover Current
| Parameter | Value |
|---|---|
| Hover thrust per motor | 375 g |
| Datasheet current for 375 g | ~4.7 A |
| Total hover current | 4 × 4.7 A = 18.8 A |
✅ C. Flight Time
| Parameter | Value |
|---|---|
| Battery capacity | 5000 mAh |
| Battery capacity (Ah) | 5 Ah |
| Hover current | 18.8 A |
| Theoretical flight time | 5 Ah / 18.8 A × 60 min = 18 min |
| Practical (80% rule) | ~14.4 min ✅ |