

MARVEL FINAL REPORT
Overview
In the process of completing my Marvel Level-0 tasks, I've gained a lot of knowledge about a lot of stuff. From basics like breadboards to stuff like microprocessors, ive learnt a lot of new things. In this journey, ive met a lot of people with innovative minds that have inspired and thought me A LOT OF THINGS.
Task-1 3D-Printing
This task gives us indepth knowledge about 3-D printing, the working of a 3-D printer, the types of supports and the materials used to print.
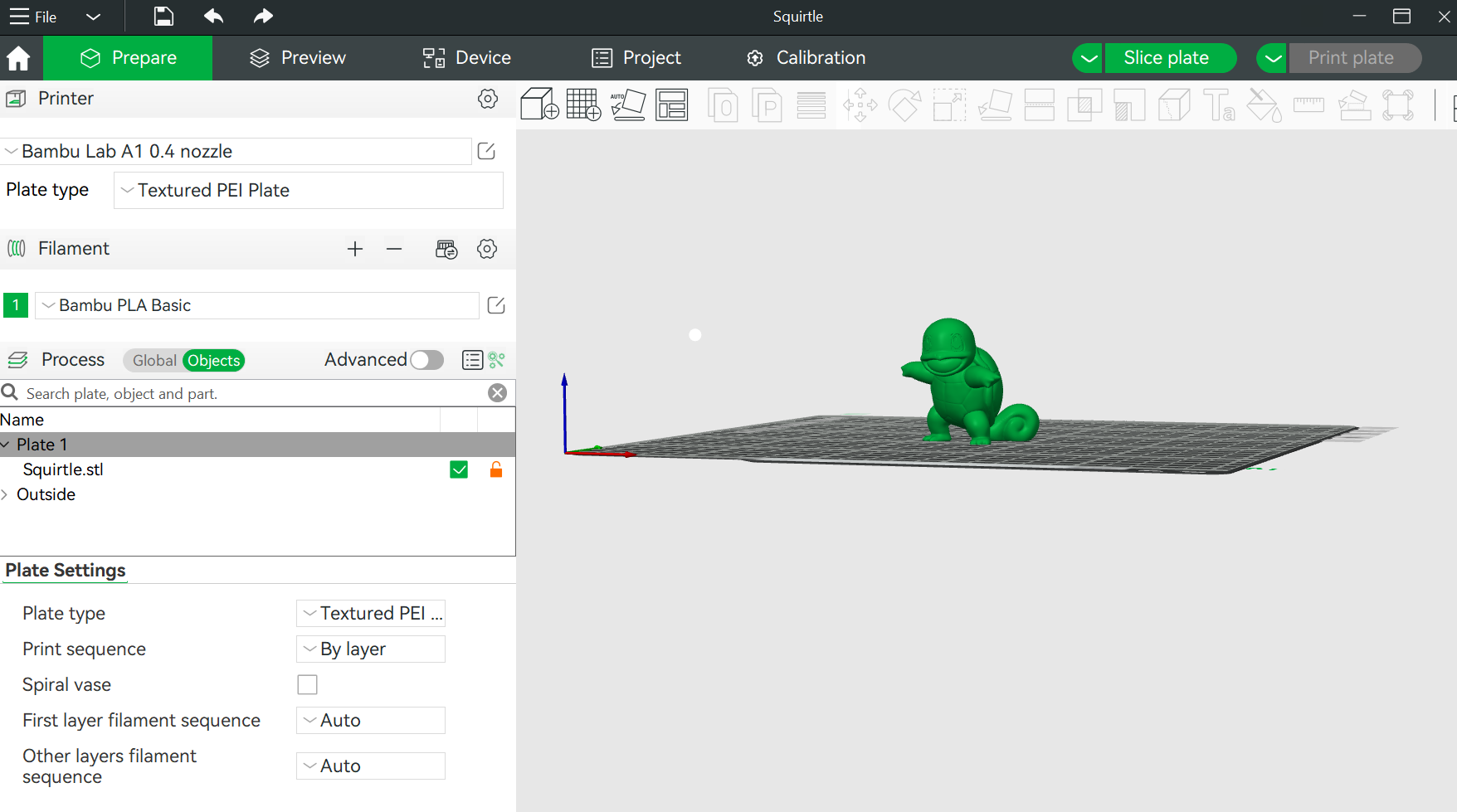
I have 3-D printed a squirtle (pokemon). I took a STL file from thingiverse and modified the dimentions using the scale option in bambu studio. I scaled down my model to 50% to finish the printing within 1 hour of time. I have added tree supports for my model, as this is the most hazzle free way.
Task-2 API
API (Application Programming Interface) They enable 2 software components to communicate with each other using a set of pre defined codes. This task is to build an API of our choice.
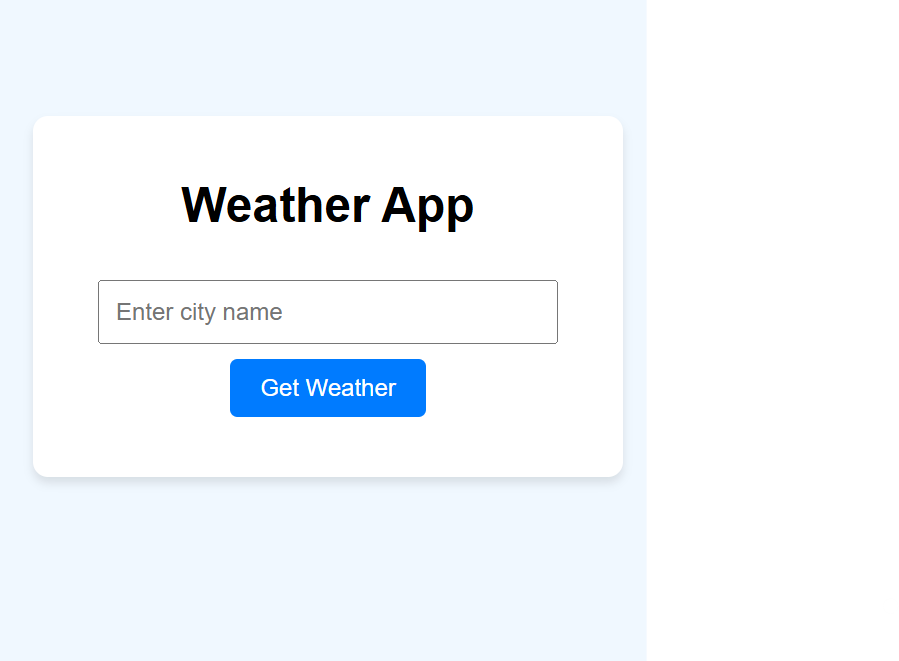
I have learnt about the working of API, on how they accept commands, extract information from the given website using the unique API key and displays the necessary information for the user. I have build a weather API which accepts the city name from the user and displays the weather in that particular city.
Task-3 Working with Github
The primary objective of this task is to understand Github actions and pull a request.
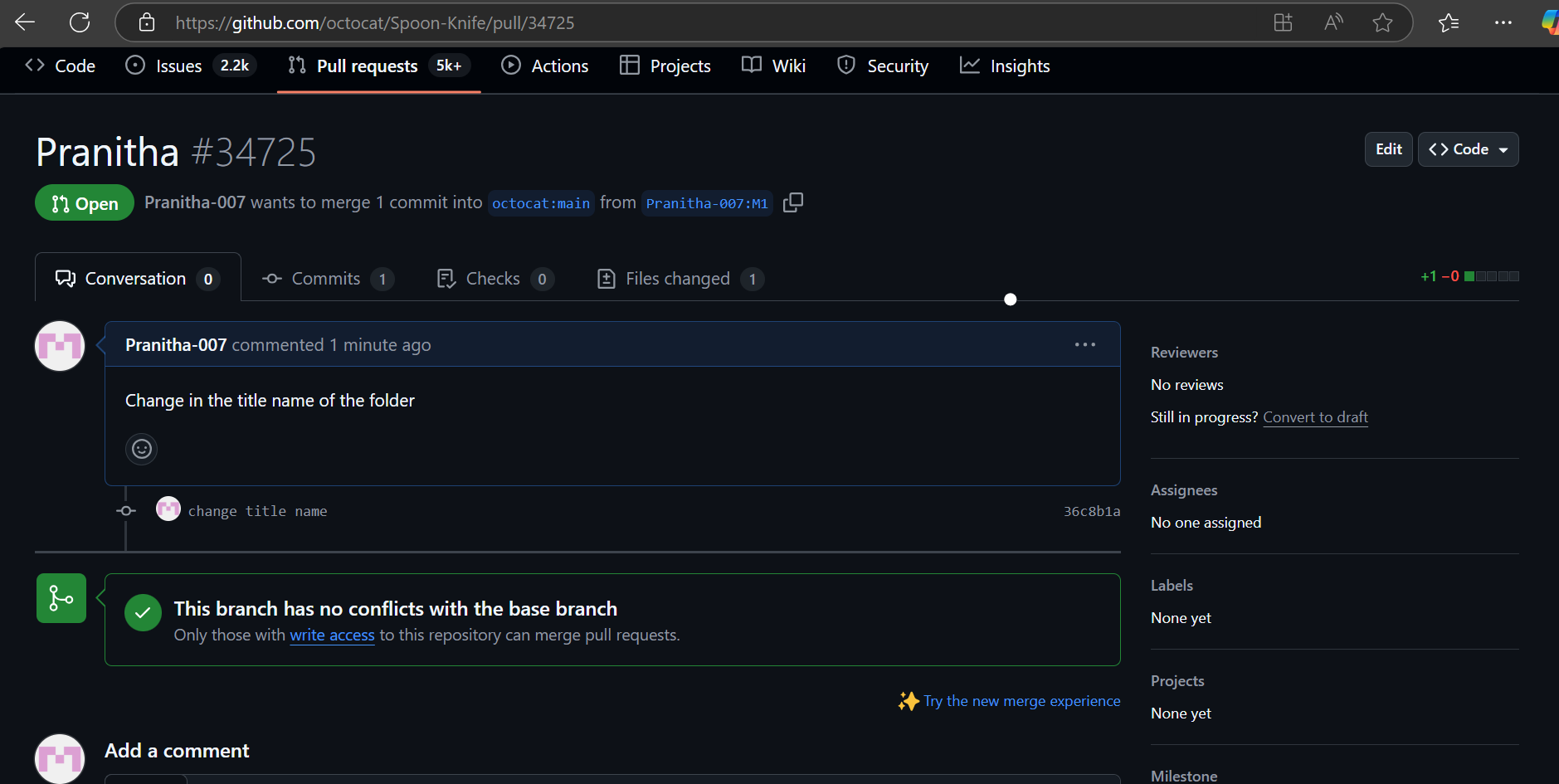
In this task I first forked the given file into my account using gitclone. I made the necessary changes in the code and added it back to the repository and compared the files thus finishing the task.
Task-4 Getting familiarized with the command line on Ubuntu
The primary objective of this task is to understand different commands on Ubuntu and finish the assigned tasks.
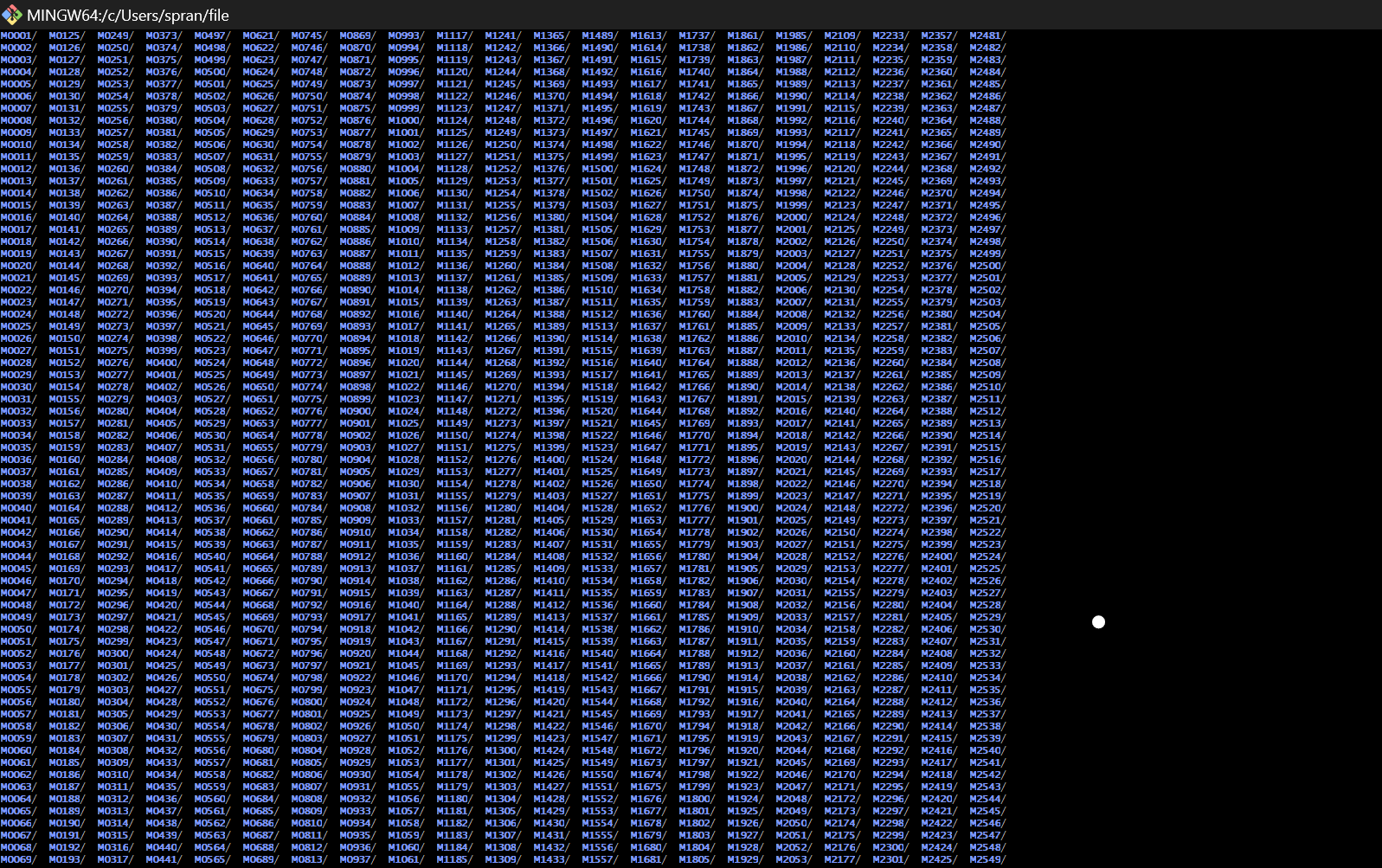
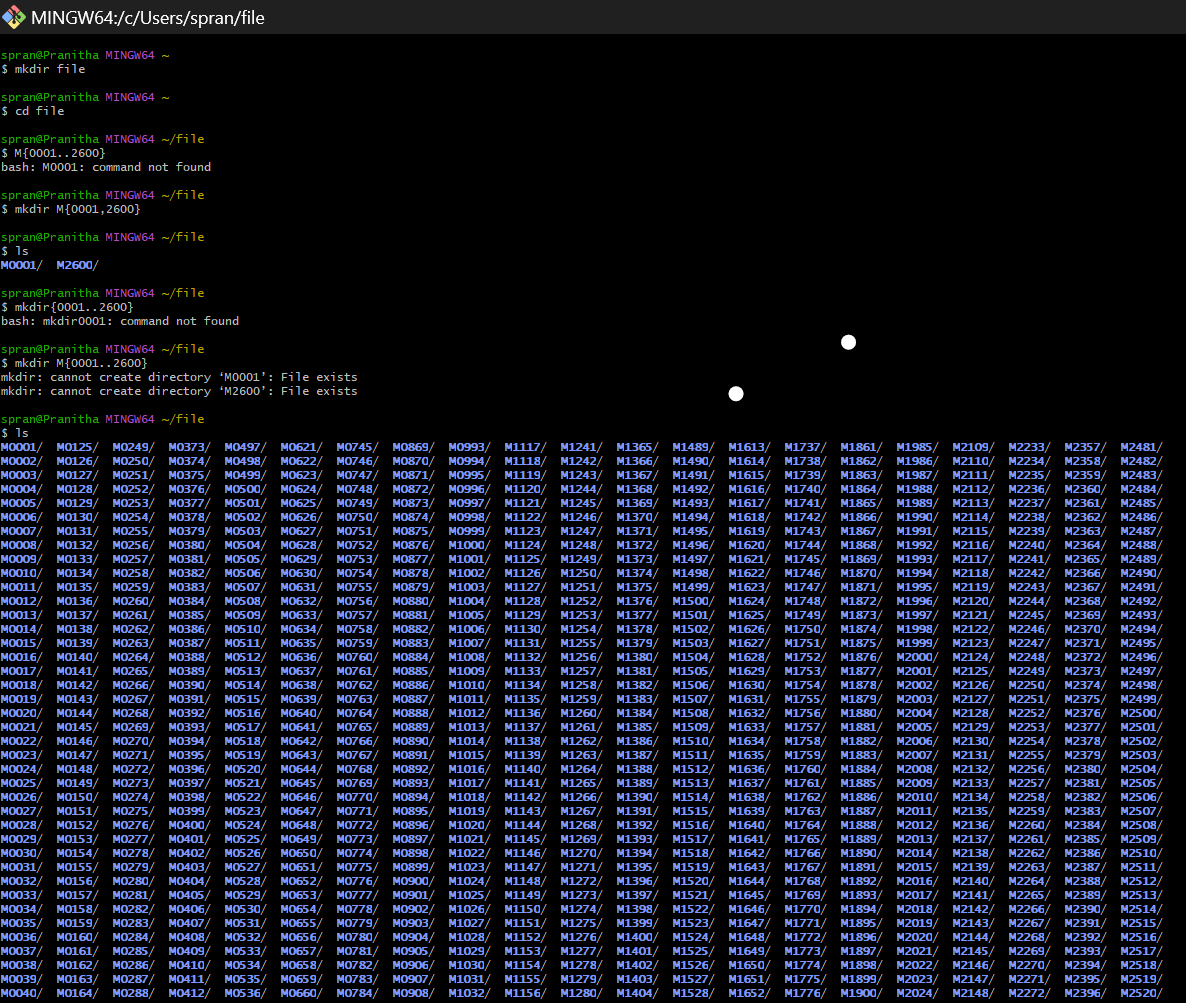
- Create a file named test
- cd into test
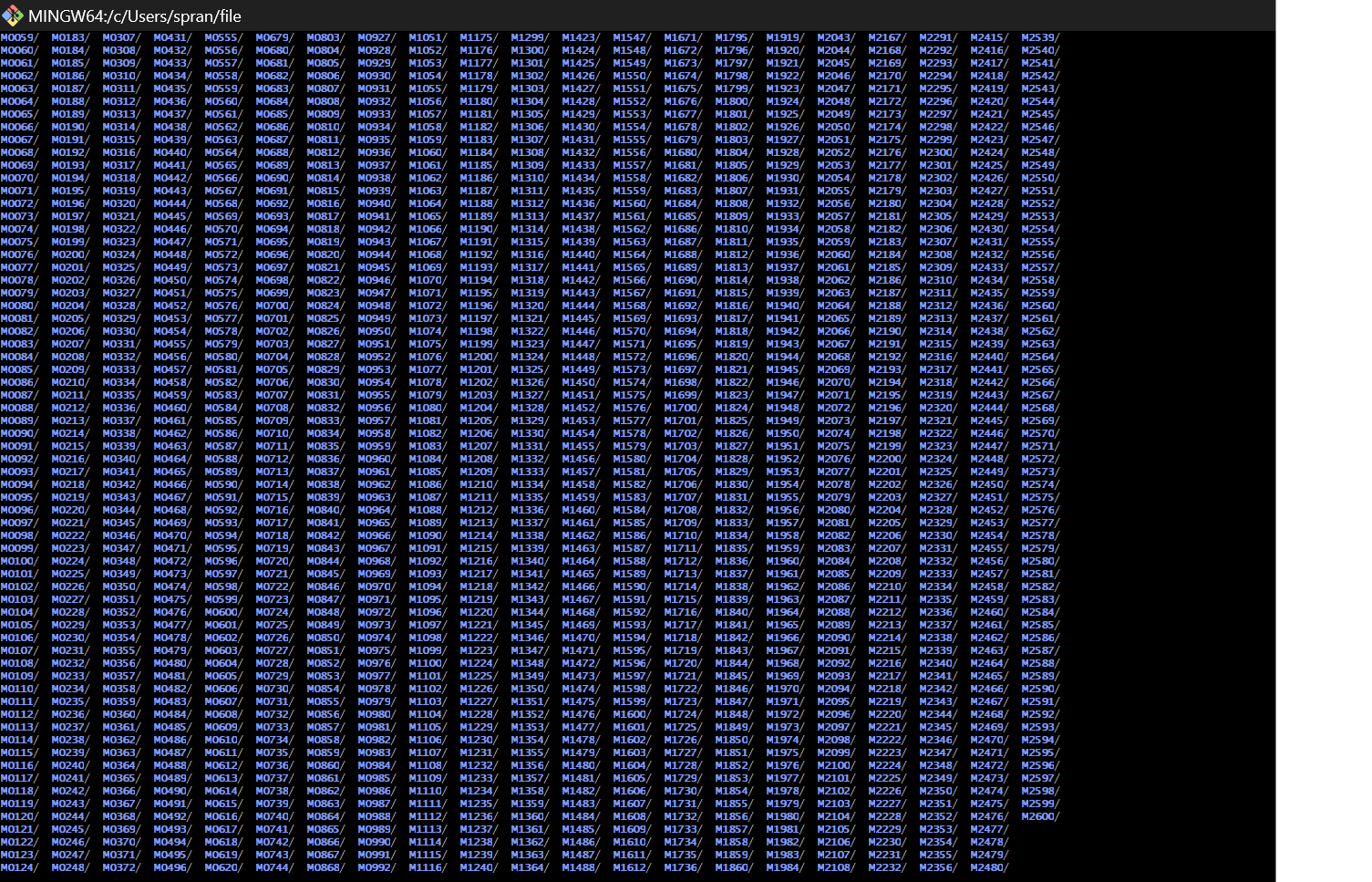
- create 2600 files in test
- list the created files
- concat 2 files
Task-5 Kaggle contest
Make a kaggle account, visit the website and complete the competition
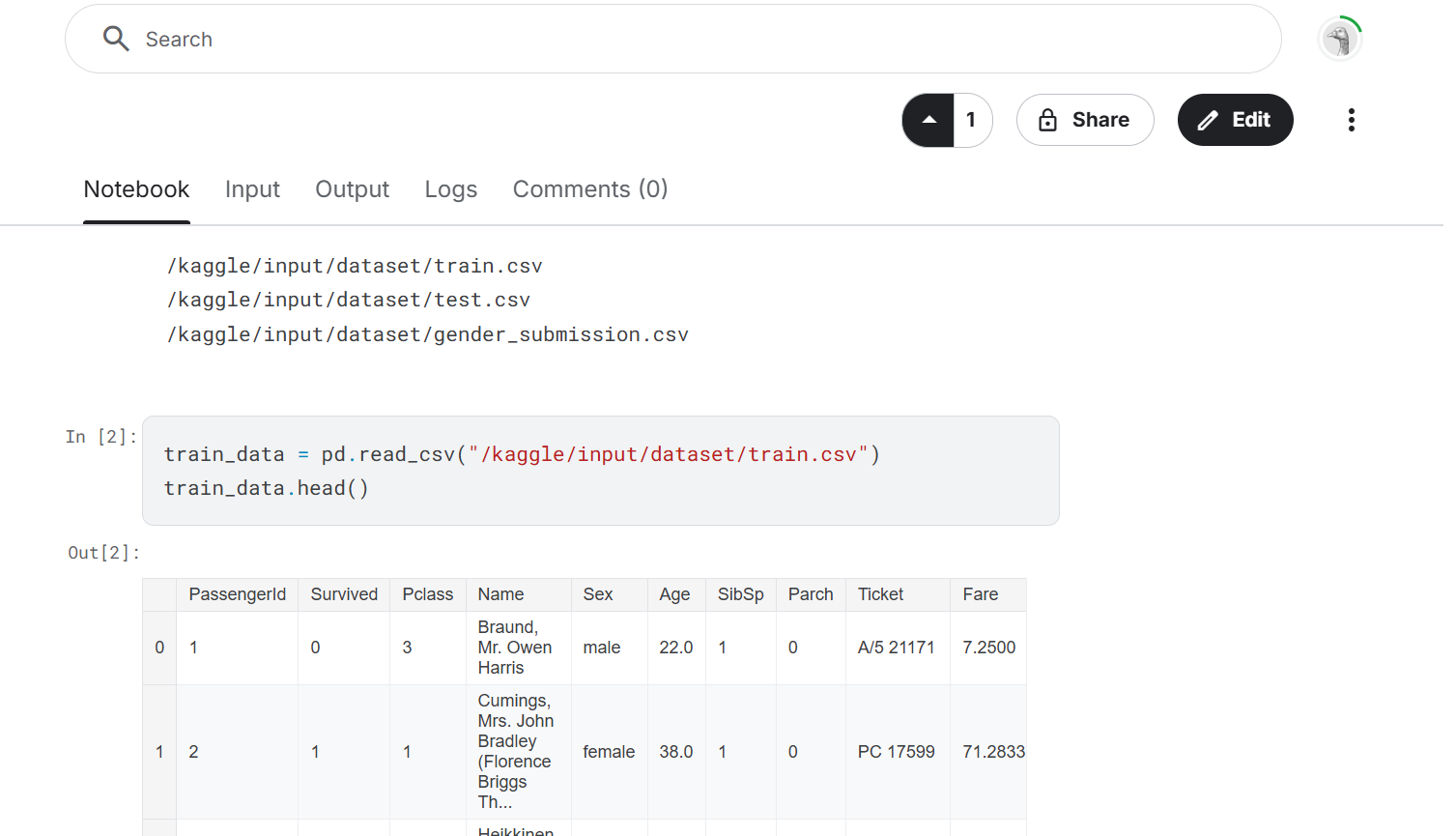
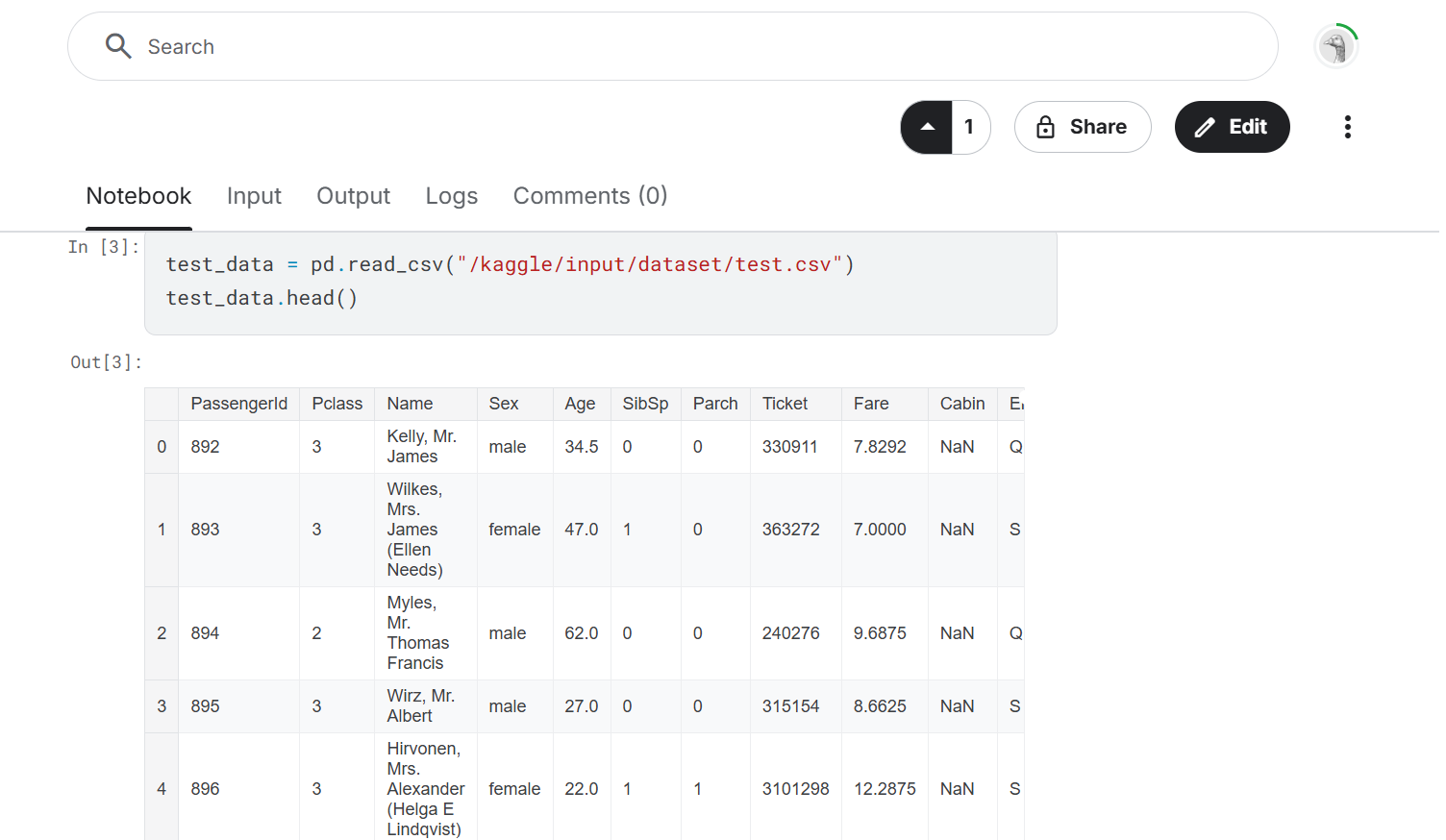
Participate in the Titanic ML competition – the best, first challenge for you to dive into ML competitions and familiarize yourself with how the Kaggle platform works.The competition is simple: use machine learning to create a model that predicts which passengers survived the Titanic shipwreck.
Task-6 Working with Pandas and Matplotlib
This task is to plot basic graphs with the help of python pandas for any set of data.
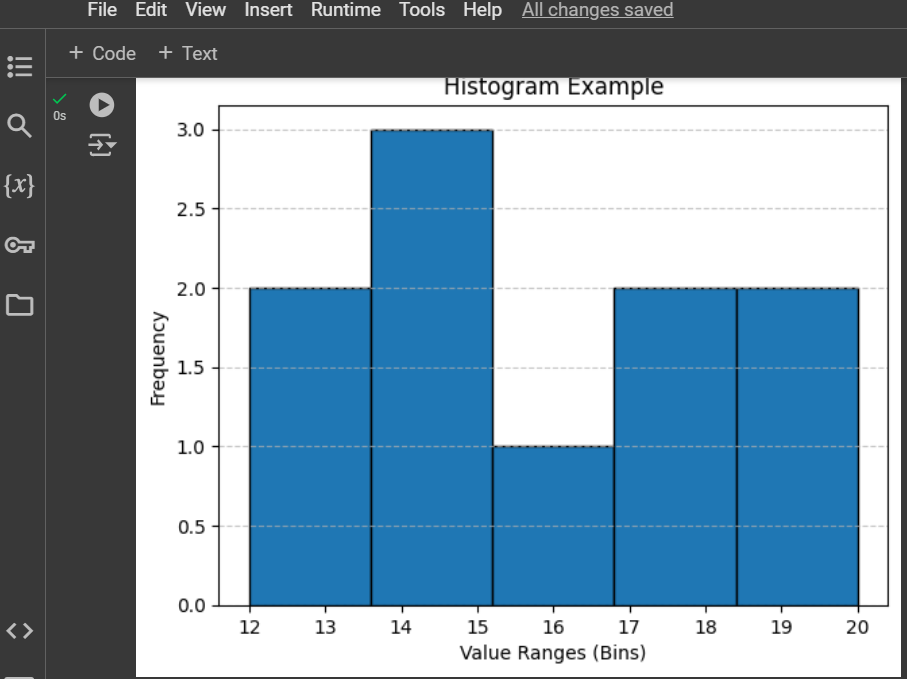
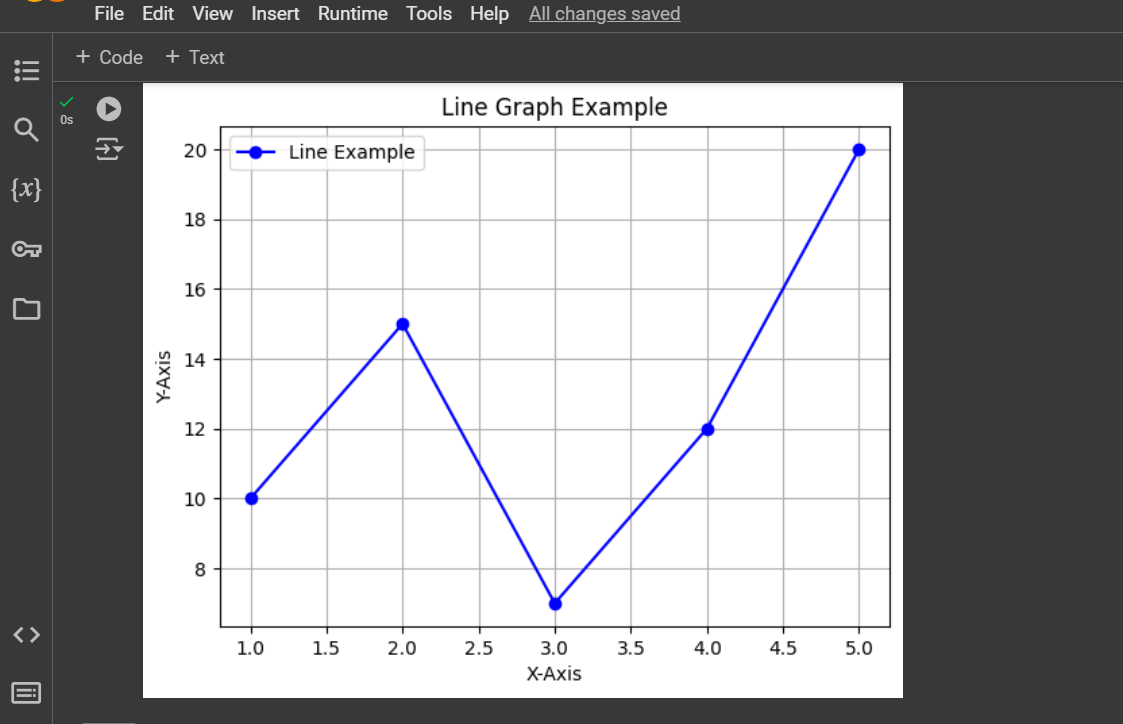
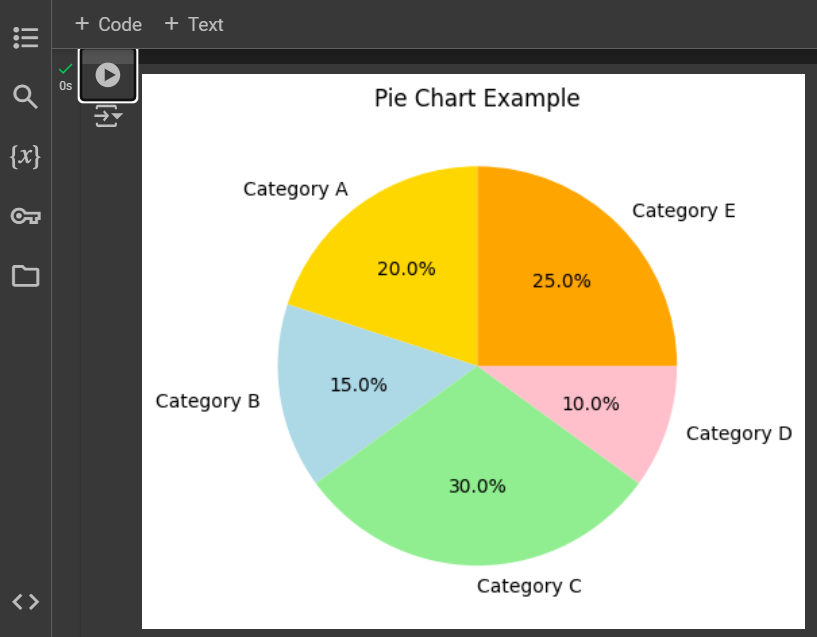
In this task, I have written the code for a bar graph, pie chart and line chart for a random set of values. I have written the code using the python pandas module in google colab, thus gaining knowledge on the basic working and plotting of graphs for a set of values.
Task-7 Create a Portfolio Webpage
This task is to create a portfolio website.
I have a built a portfolio website of myself which contains details about myself, my educational qualification and related details, my interests and contact information. I have completed this task and gained abundant knowledge about HTML and CSS.
Task-8 Writing a Resource Article using Markdown
This task is to write a report understand and use some basic commands of markdown to write a report on any desired topic of our choice.
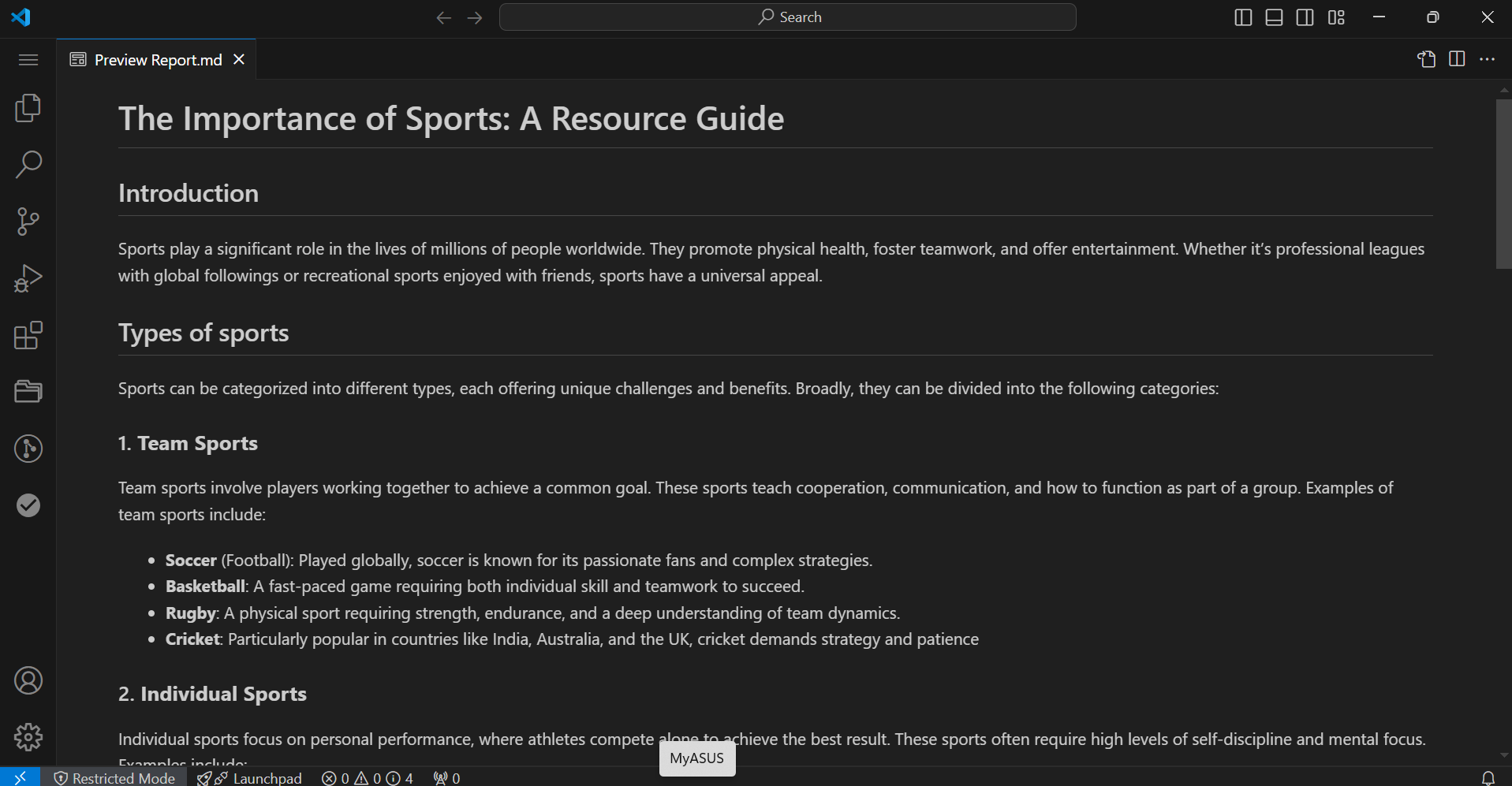
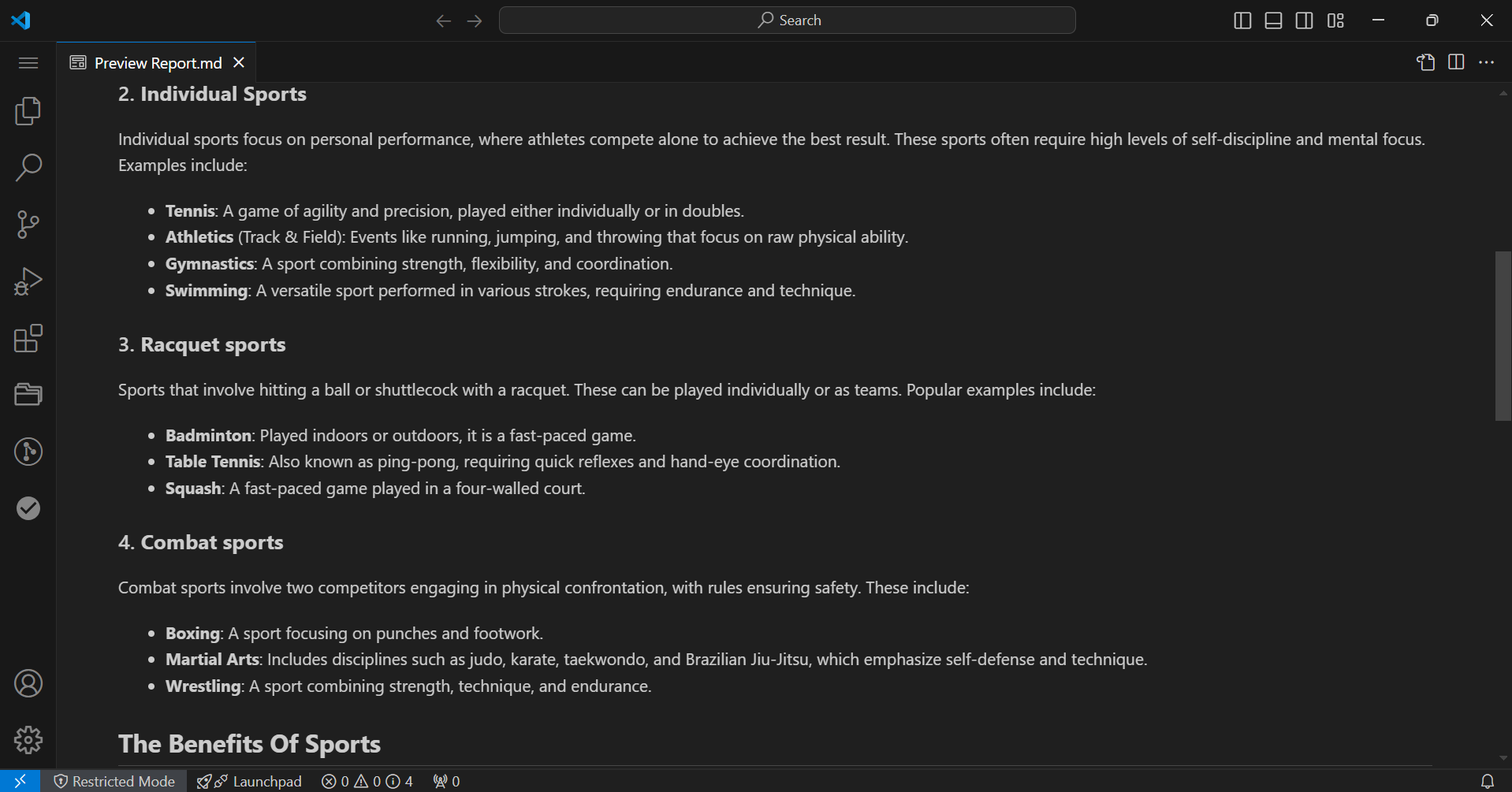
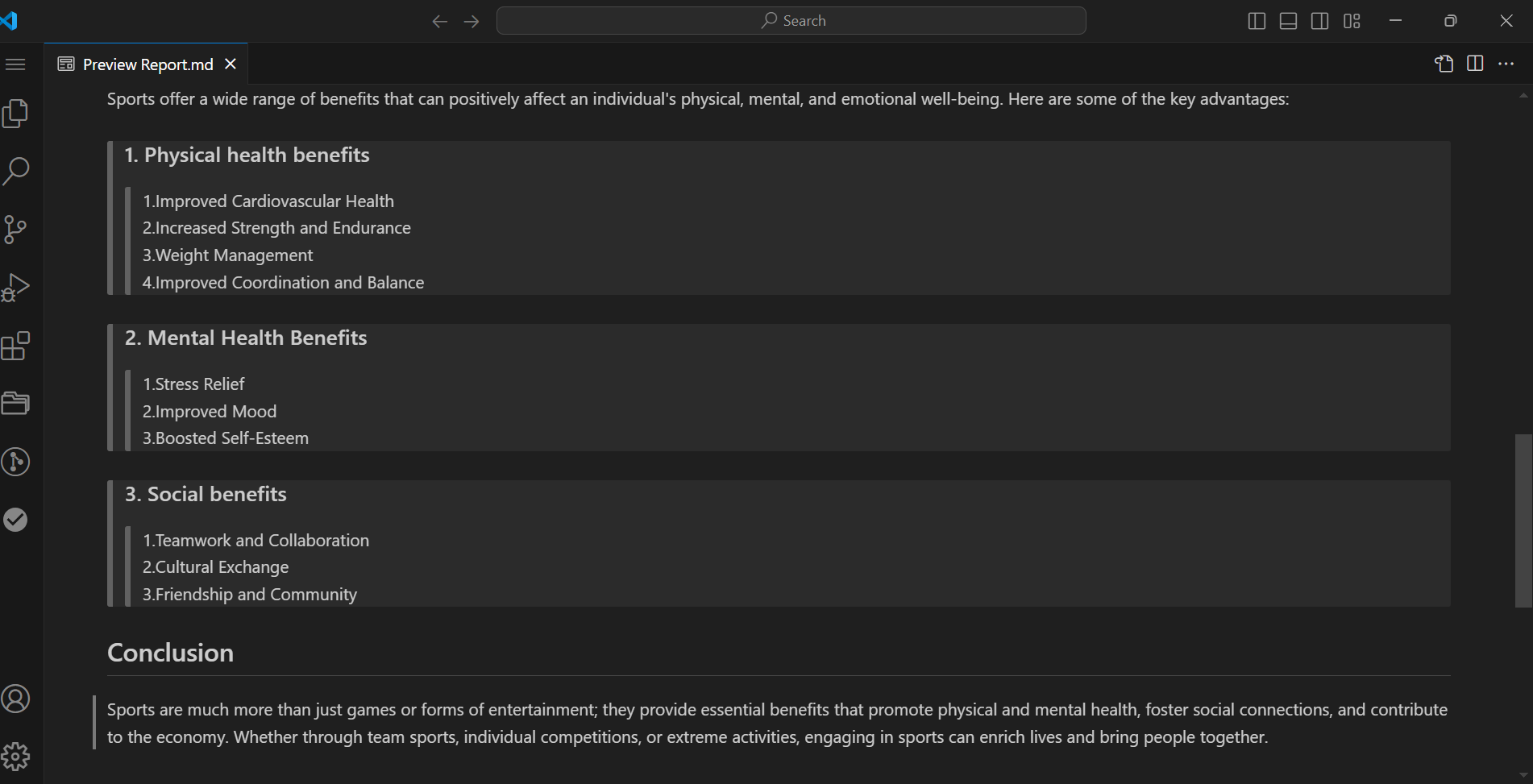
For this task, I have written a report on sports with the help of some basic markdown commands for different headings, fonts, italix, bold, indexing etc
Task-9 Tinkercad
This task requires us to create a tinkercad account and learn how to build a basic circuit to estimate the distance between an obstacle and the sensor.
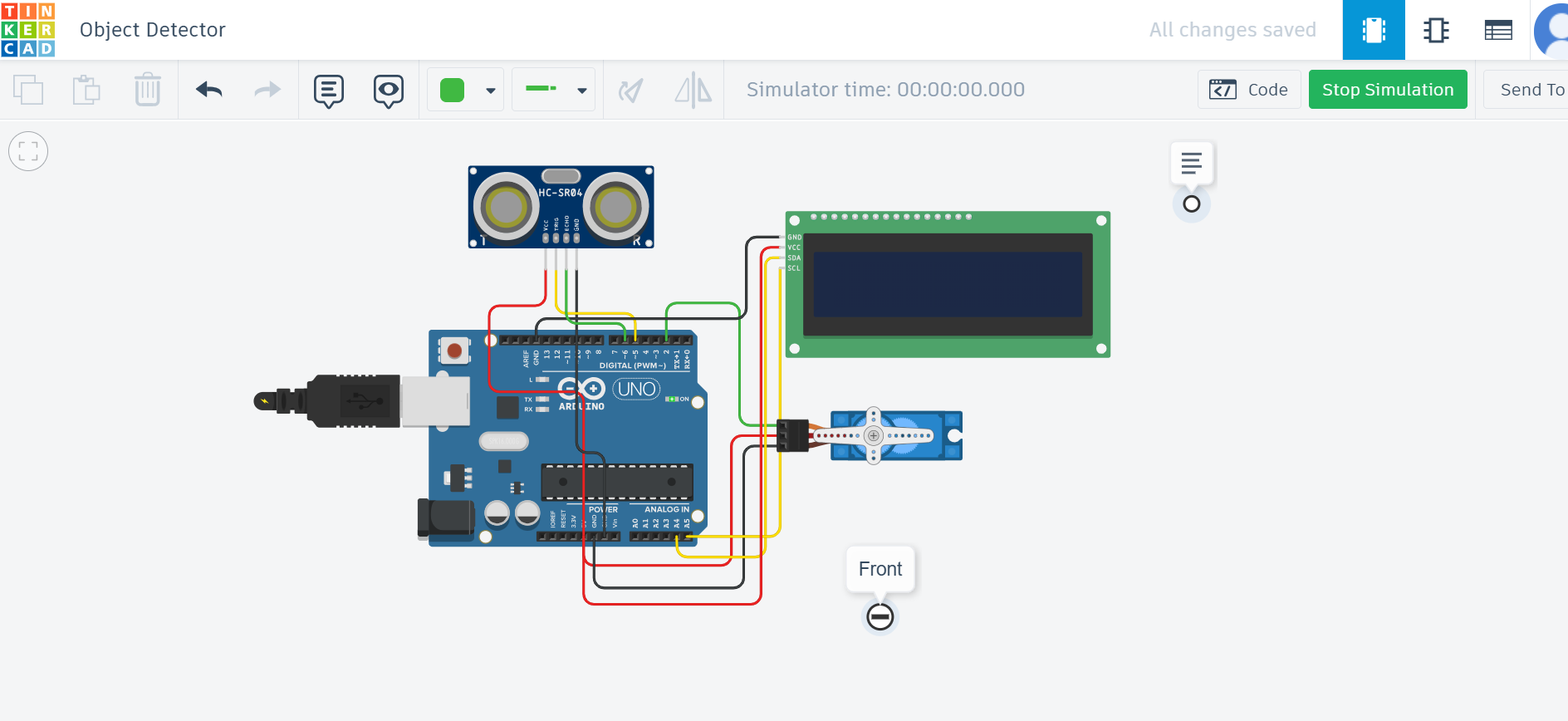
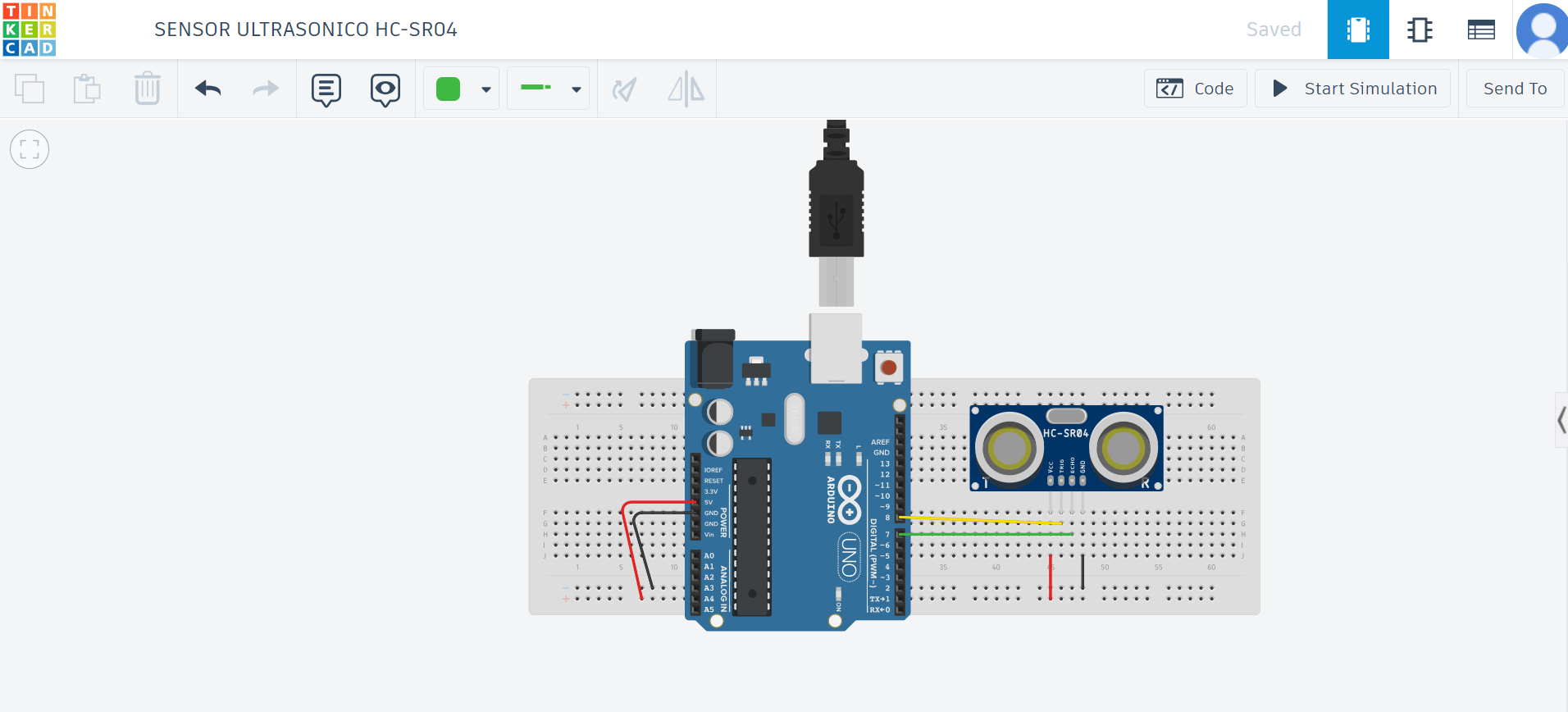
I have used certain basic components and designed this circuit that measures the distance with the help of ultrasonic sensors. Components used are :
- Arduino Uno board
- Ultrasonic sensor (HC-SR04)
- LCD I2C Display
- Jumper wires
Task-10 Speed Control of DC Motor
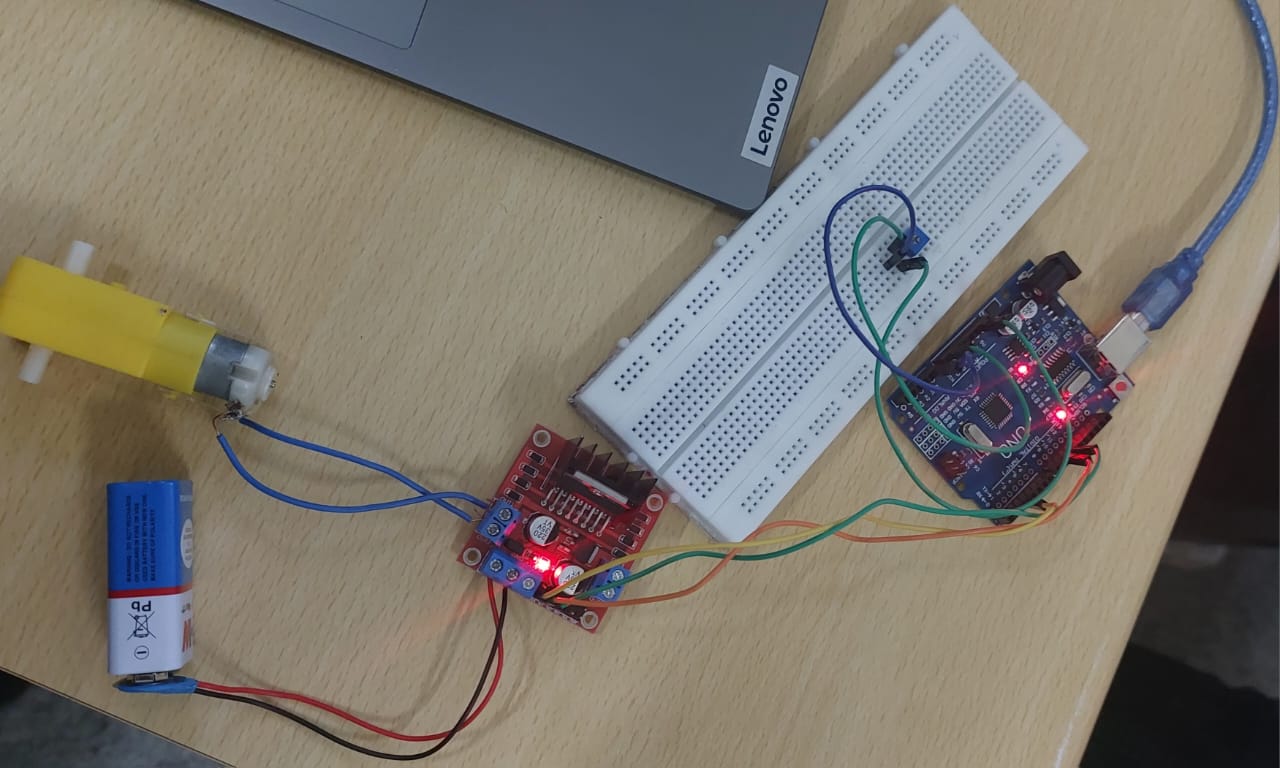
In this task I learnt how to control the speed of a DC motor using an Arduino UNO and change the direction of rotation of the motor through the H-Bridge. The speed of the DC motor is varyied by varying the input voltage using the potentiometer.
Task-11 LED Toggle Using ESP32
The objective of this task is to learn the working of ESP32 and make a web server with the help of wi-fi and control 2 led connected to the device

Task-12 Designing a 555 astable multivibrator
This task is to design a 555 astable multivibrator with duty cycle 60%, rig up the circuit on a breadboard and by using probes observe the output of your circuit on the DSO.
.jpeg)
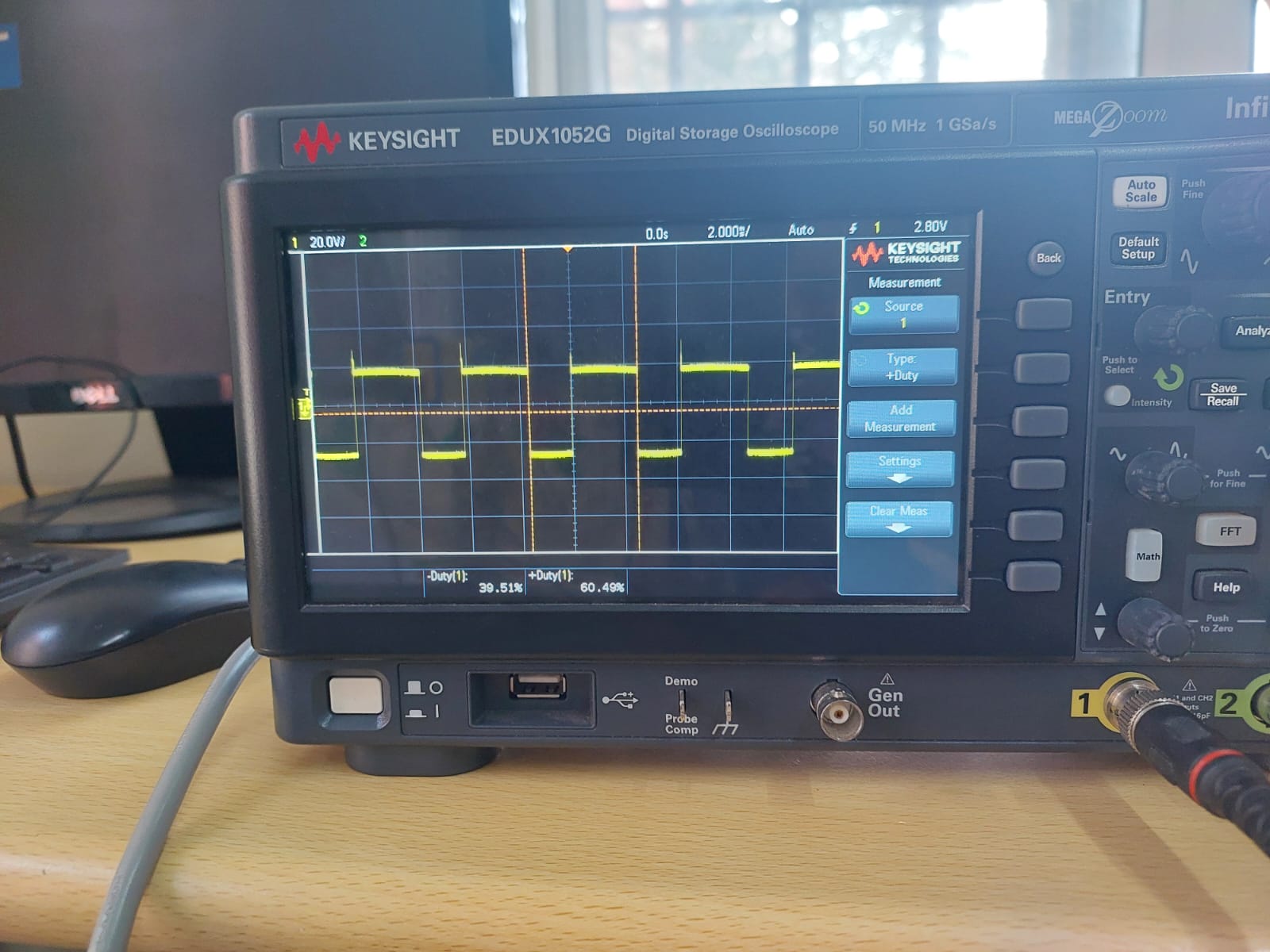
I have made the circuit using the below mentioned components and measured the duty cycle using probes which was 60.4%
- 555 IC
- Breadboard
- Jumper wires
- Osciloscope
Task-13 Karnaugh Maps and Deriving the logic circuit
Task-14 Data sheet report writing
Report on L293D
- Introduction
The L293D is a popular motor driver IC widely used to control the direction and speed of DC motors. It operates on the principle of the H-bridge circuit, which allows the motor to rotate in both clockwise and counterclockwise directions. With built-in diodes for protection and the ability to handle moderate power levels, it is a versatile and efficient choice for robotic and automation projects.
- Task Description
The L293D motor driver is tasked with controlling:
-
The speed of the motor using Pulse Width Modulation (PWM).
-
The direction of the motor using an H-bridge circuit.
-
Protection of the motor and the driving circuit from voltage spikes.
- Overview of the L293D IC
The L293D is a dual H-bridge motor driver IC that can drive two DC motors simultaneously. Key specifications include:
Voltage Range: Operates between 4.5V to 36V.
Current Output: Up to 600mA per channel (peak of 1.2A).
Logic Voltage: Compatible with 5V logic levels.
Built-in Diodes: Protect against back EMF from motors.
Pin Configuration The L293D has 16 pins divided as follows:
Motor Control Pins: IN1, IN2, IN3, IN4 (for controlling motor direction).
Enable Pins: EN1 and EN2 (for enabling/disabling motors).
Output Pins: OUT1, OUT2, OUT3, OUT4 (connected to motors).
Power Supply Pins: VCC1 (logic voltage), VCC2 (motor voltage), and GND.
- H-Bridge Circuit
The H-bridge is a fundamental circuit design used to control the direction of DC motors.
Working:
The motor is connected between four switches (transistors or MOSFETs).
Closing diagonal switches (e.g., S1 and S4) causes current to flow in one direction, making the motor spin in one direction.
Reversing the switches (e.g., S2 and S3) reverses the current, changing the motor's direction.
In L293D:
The H-bridge is integrated into the IC, simplifying the design and allowing for easy motor control.
- Pulse Width Modulation (PWM)
PWM is a technique used to control the speed of the motor by varying the duty cycle of the input signal.
Duty Cycle: The percentage of time the signal is high in a cycle. A higher duty cycle corresponds to a higher motor speed.
Implementation in L293D:
The enable pins (EN1 and EN2) of the IC are used for PWM.
By connecting a PWM signal from a micro-controller to the enable pins, the motor speed can be controlled effectively.
- ICs Used in L293D
The L293D is built with:
Bipolar Junction Transistors (BJTs): Form the H-bridge structure.
Schottky Diodes: Protect the circuit from back EMF.
Logic Gates: Process input signals for proper motor control.
Task-15 Introduction to VR

Virtual Reality (VR) is a technology that creates immersive, computer-generated environments that simulate real or imagined worlds. By using VR headsets and sometimes additional equipment like controllers or motion sensors, users can interact with these 3D environments in real-time, offering a sense of presence and immersion. VR has applications across various fields, including gaming, education, healthcare, architecture, and training simulations, making it a transformative tool for both entertainment and professional purposes. Its ability to transport users to entirely new realms marks a significant leap in digital interaction and visualization.
Task-16 Hands on experience with VR

Definition
Virtual Reality (VR) is a computer-generated technology that immerses users in an interactive, three-dimensional (3D) digital environment. It uses sensory devices such as head-mounted displays (HMDs), motion controllers, and sometimes additional accessories like gloves or treadmills to simulate experiences that mimic or surpass reality.
Key Components of VR
- Hardware
Head-Mounted Display (HMD): A VR headset that provides visual and sometimes auditory input. Examples include Meta Quest, HTC Vive, and PlayStation VR.
Motion Controllers: Devices that track hand and body movements, enabling interaction with the virtual environment.
Tracking Systems: Cameras, sensors, and gyroscopes that track the user's position and movements.
Additional Accessories: Gloves, haptic suits, and treadmills to enhance sensory immersion.
- Software
VR software creates 3D environments and experiences. These range from games and simulations to virtual meetings and training programs.
Engines like Unity and Unreal Engine are commonly used for VR content development.
How VR Works
-
Immersion: VR technology provides a 360-degree view, placing the user at the center of the experience.
-
Interaction: Users can interact with the virtual environment through motion-tracked devices.
-
Sensory Feedback: Some systems include haptic feedback to simulate touch, vibration, or resistance.
Task-17 Sad servers - "Like LeetCode for Linux"
In this task we find the murderer using some linux commands searching thorugh the data and clues given. Thus making the server happy.

Task-18 Make a Web app
Using express I created a resource library website where the user can browse the resource articles, books etc which are available and also manage your account.


Task-19 Active Participation:
I took part and completed the Introduction to Javascript course by coursea.

I took part and completed the Web development using python and flask course.
