BLOG · 20/8/2024
Level 2
Coursework of Tasks completed

Task 1:
SPI Communication :
SPI is one of the way of communication protocol which uses one master and multiple slave .
It uses four wire for communication like MISO,MOSI,SCK,SS.
MISO - Line to receive data from slave.
MOSI - Line to send data from slave.
SCLK - Master generates clock for slave.
SS/CS - This line can select one slave , with multiple slave multiple SS line.
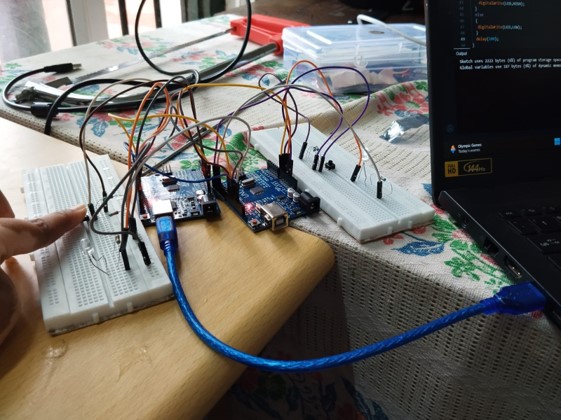
In this task we are using one master aurdino uno and one slave . We connected 5V to Vin of slave .We communicated with pushbutton and led . Its communication speed is more 10mbps I2C and short range .
Task 2:
I2C communication :
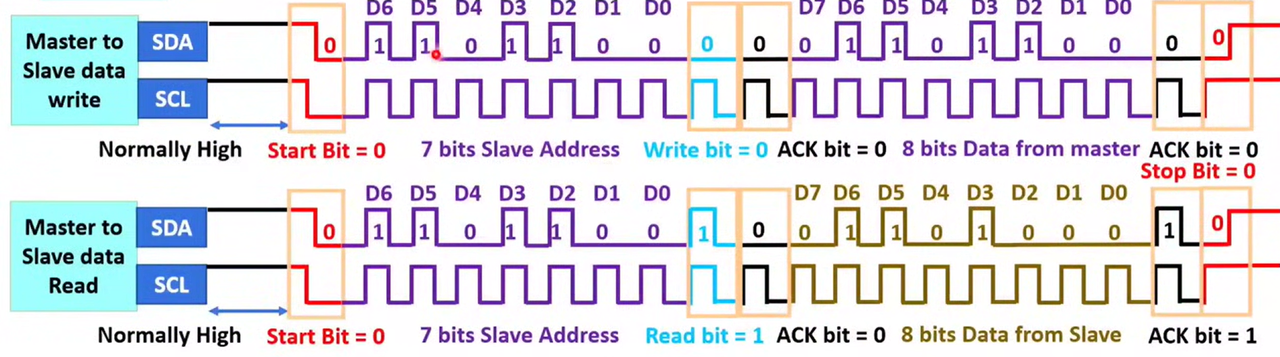
Multi - master multi - slave communication protocol with use two wires SDA,SCL where the information is carried along the clock like read or write ,usually SDA carries address in binary low or high . Addressing is done by 7bits to communicate with 128 devices at max .
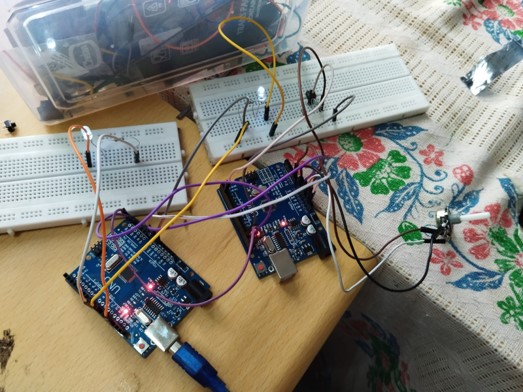
In this task instead of connected LCD Display we used one push botton to switch between the one master and one slave . Potentiometer to vary the intensity of light .
Task 3:
Speed Control of BLDC :
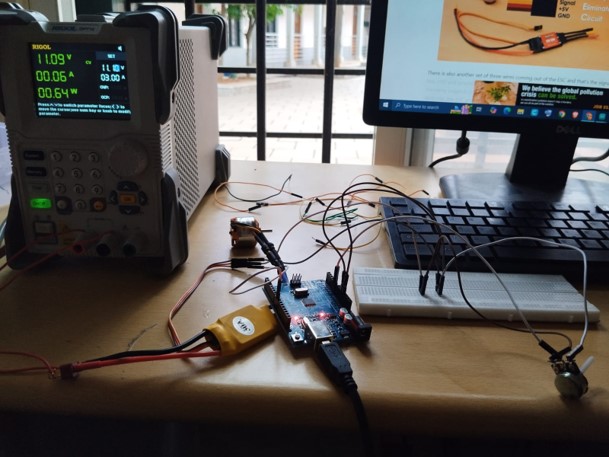
I completed the task of controlling the speed of a BLDC motor using an Arduino Uno, ESC (Electronic Speed Controller), and a potentiometer. Instead of using a LiPo battery, I opted for a stable power supply of 11V. By varying the potentiometer, the motor's speed was effectively controlled, demonstrating the precision of using this setup for speed regulation in a brushless motor system. This setup enhances efficiency and minimizes wear and tear, fulfilling the aim of the experiment.
I connected the ESC’s signal wire to a PWM output pin on the Arduino. The ESC’s power wires were connected to the 11V power supply, and the motor was wired to the ESC. The potentiometer was connected to an analog input on the Arduino, and I wrote a code that reads the potentiometer’s value, converts it into a PWM signal, and sends it to the ESC to control the motor speed.
Task 4 :
Make a Lithium-ion Battery Pack :
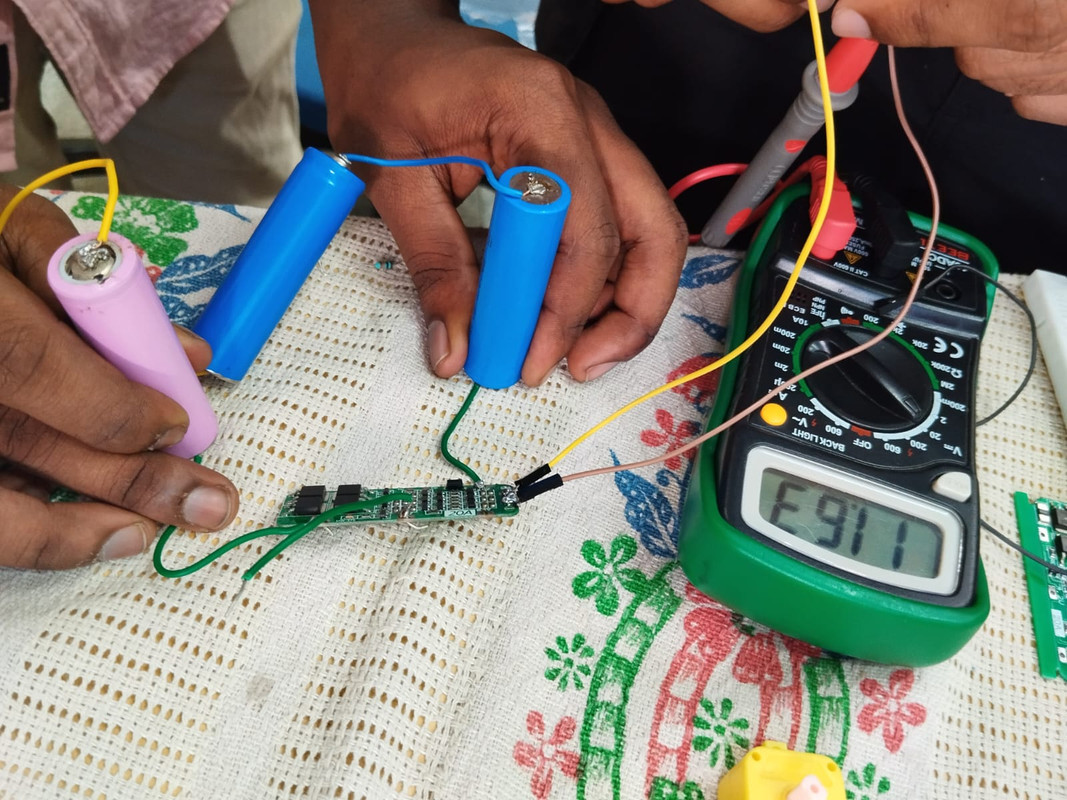
For this task, I created a lithium-ion battery pack by connecting three batteries in series. I used a multimeter to check the voltage of each individual battery to ensure they were functioning correctly. After connecting them in series, I measured the combined voltage across all three batteries, confirming the proper connection and voltage levels.
Connected three 3.7V lithium-ion batteries in series, the total voltage got is 11.4V (3.7V × 3)
Task 5 :
BMS :
This function contributes to maintaining the health and safety of the battery pack.
connecting three lithium-ion batteries with a 20 A Battery Management System (BMS), the primary function engaged with was voltage measurement. The BMS monitored the voltage of each battery cell, ensuring they operate within safe limits. This measurement is crucial because it helps determine the state of charge of the batteries and ensures they are balanced. By measuring the voltage, we can identify any issues, such as a cell being overcharged or undercharged, which could lead to damage.
However, there are additional functions of the BMS, such as temperature monitoring and current regulation, that can be performed in this task.
Task 6 :
Working with multiple sensors:
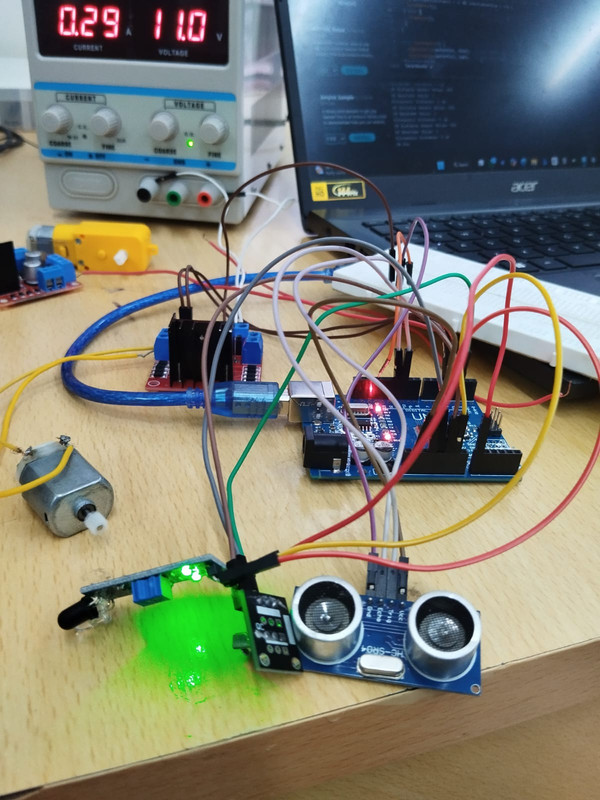
Hands on experience with working with multiple sensors . I used sensors like ultrasonic senor , IR receiver senor , IR object detector used these sensors to detect the distance and based on the range of distance motor will run . Sensors with aurdino uno , motor driver LN298 , motor .
Task 7:
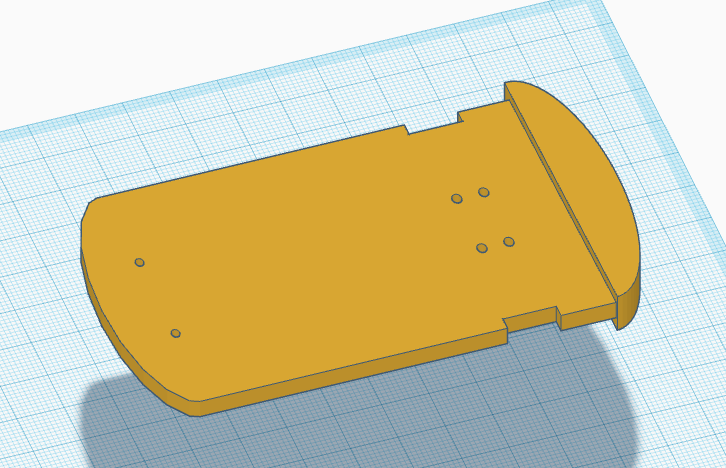
Build Chasis :
The design of RC chasis with accomodation of aurdino uno , battery pack and with four wheels . I used thinkercard to design the chasis with minimal design.
Task 8:
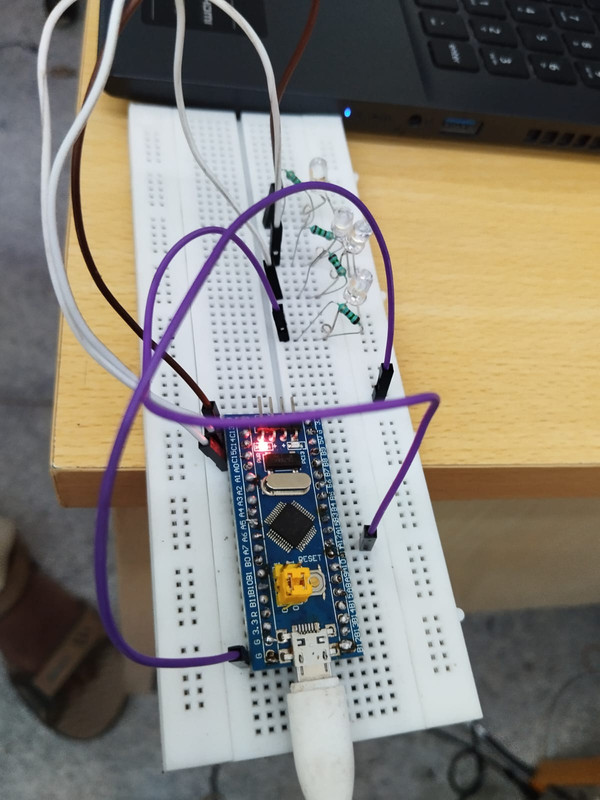
STM32 :
In this task of blinky led with stm32 , tried with working with software like keil , and stm board . Since i was familar with aurdino , stm 32 was different and which has wide range application in industries but aurdino was used for basic